20
PAYLOAD CALIBRATION
(Can be done indoors with motors switched OFF)
COMPASS CALIBRATION
(To be done outdoors, inight)
1. Attach the payload to be calibrated.
2. Switch ON the payload, the Intel Falcon 8+ UAV and the Intel Cockpit Controller.
3. In the Status Display, navigate to ‘Settings’ > ‘Payload
Calib.’ and press ‘ENT’.
3. Hover the Intel Falcon 8+ UAV in GPS-Mode around
30 m altitude in a spot with good GPS reception, and no
magnetic disturbances.
4. The camera will rotate fully downwards and then move to
the fully upwards position.
Place the Intel Falcon 8+ UAV on an elevated
platform to make sure the payload does not
hit the ground and cause damage when it tilts
downwards.
4. In the Status Display, navigate to ‘Settings’ > ‘Compass
Calib.’ and press ‘ENT’.
5. When the payload stops moving, switch OFF the payload,
the Intel Falcon 8+ UAV, and Intel Cockpit Controller.
5. After the Intel Falcon 8+ UAV makes a 400° turn, land, and
switch the complete UAS OFF.
6. Restart the complete UAS.
7. Repeat the above steps for every payload to be used.
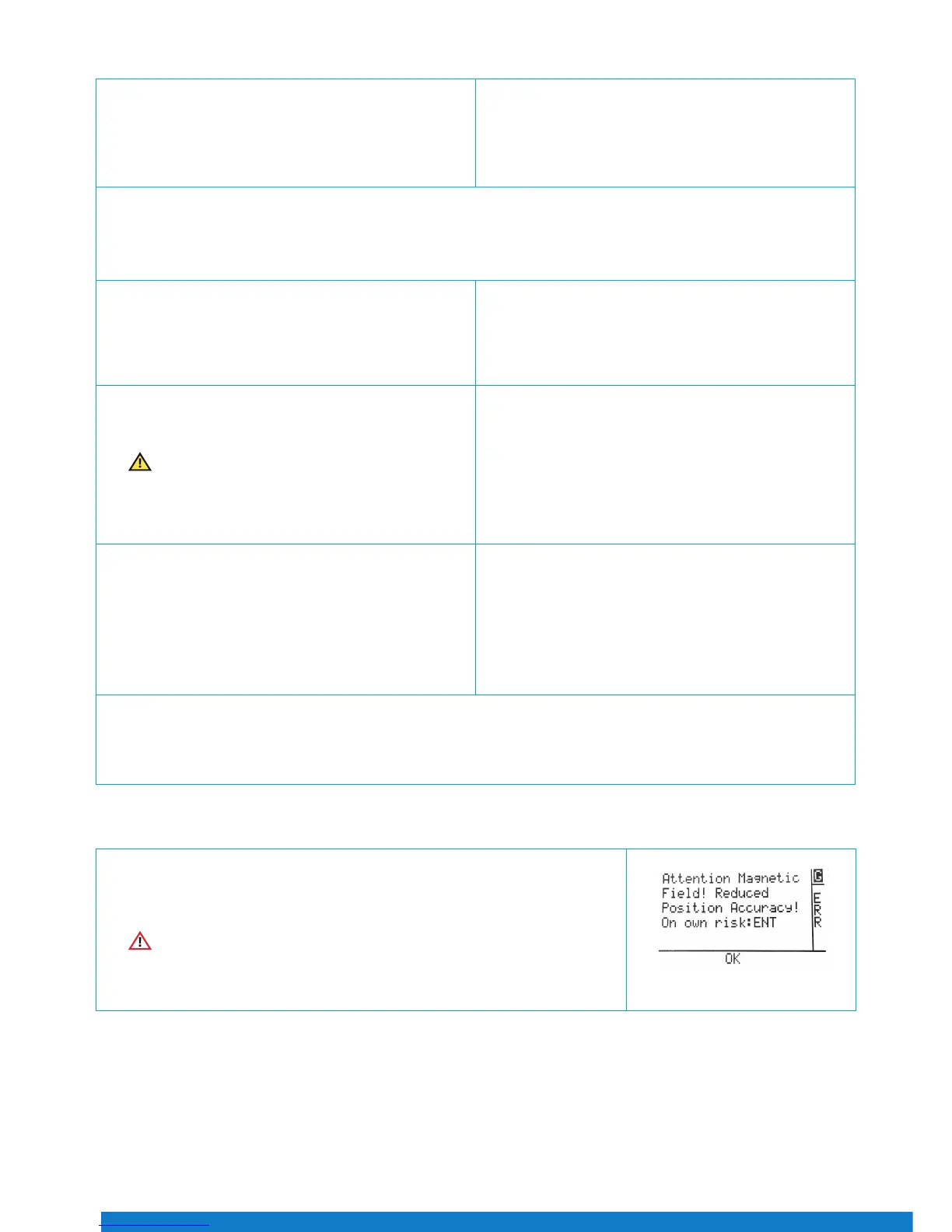
If, during start-up, a discrepancy is detected between the current magnetic eld and the
expected magnetic eld, the Status Display will show and sound a warning.
If this warning occurs, never take o from that spot in GPS-Mode! It might
lead to unexpected positional changes in the UAV.
Magnetic Field Warning
Figure 40
To resolve the warning, follow these steps:
1. Either switch OFF the complete UAS, choose a dierent starting position, switch the complete UAS ON again in the order
described above, and check if the magnetic eld warning is not shown again. In many situations the disturbances are limited
to small areas.