Goodrive300 Series VFD Basic operation instruction
144
make the motor is in a static and empty state, otherwise the result of autotune is incorrect. The
asynchronous motors can autotune the parameters of P02.06–P02.10, while the synchronous motors
can autotune the parameters of P02.20–P02.23.
3. During the motor autotune, do not to de-couple the motor form the load if static autotune is selected.
Because only some parameters of the motor are involved, the control performance is not as better as
the rotation autotune. The asynchronous motors can autotune the parameters of P02.06–P02.10,
while the synchronous motors can autotune the parameters of P02.20–P02.22. P02.23 (synchronous
motor 1 counter-electromotive force constant) can be counted to attain.
4. Motor autotune only involves the current motor. Switch the motor through P08.31 to carry out the
autotune on the other motor.
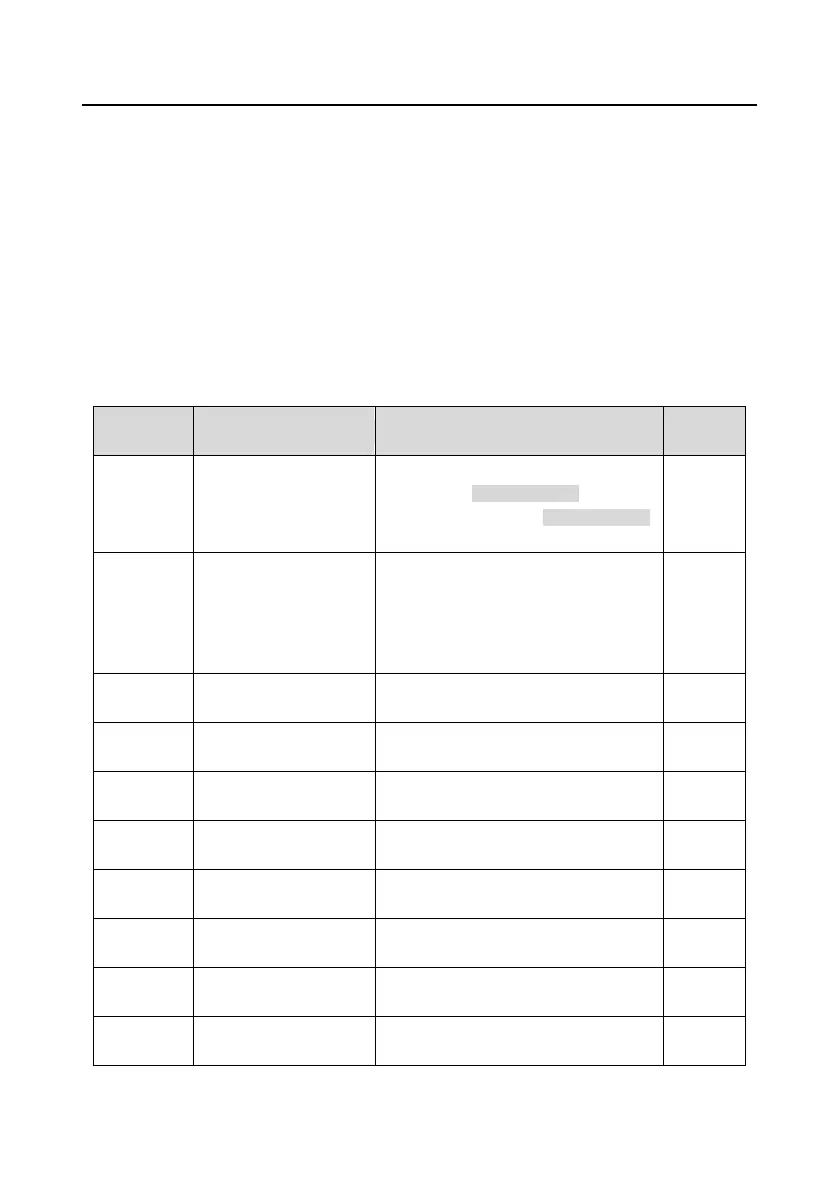
Related parameters
Detailed instruction of parameters
0: Keypad
1: Terminal ("LOCAL/REMOT" flickering)
2: Communication ("LOCAL/REMOT"
on)
Motor parameter
autotuning
0: No operation
1: Rotating autotuning
2: Static autotuning 1 (autotune totally)
3: Static autotuning 2 (autotune part
parameters)
0: Asynchronous motor
1: Synchronous motor
Rated power of
asynchronous motor 1
Rated frequency of
asynchronous motor 1
0.01Hz–P00.03 (Max. output frequency)
Rated speed of
asynchronous motor 1
Rated voltage of
asynchronous motor 1
Rated current of
asynchronous motor 1
Stator resistor of
asynchronous motor 1
Rotor resistor of
asynchronous motor 1

 Loading...
Loading...




