Copyright IXXAT Automation GmbH
CAN Repeater - Manual, Version 3.6
4
> 500 kbps
> 100 kbps
> 5 kbps
Busabschluss
CAN 2
CAN 1
error shutdown
2µs
1µs
500ns
300ns
Sperrzeit
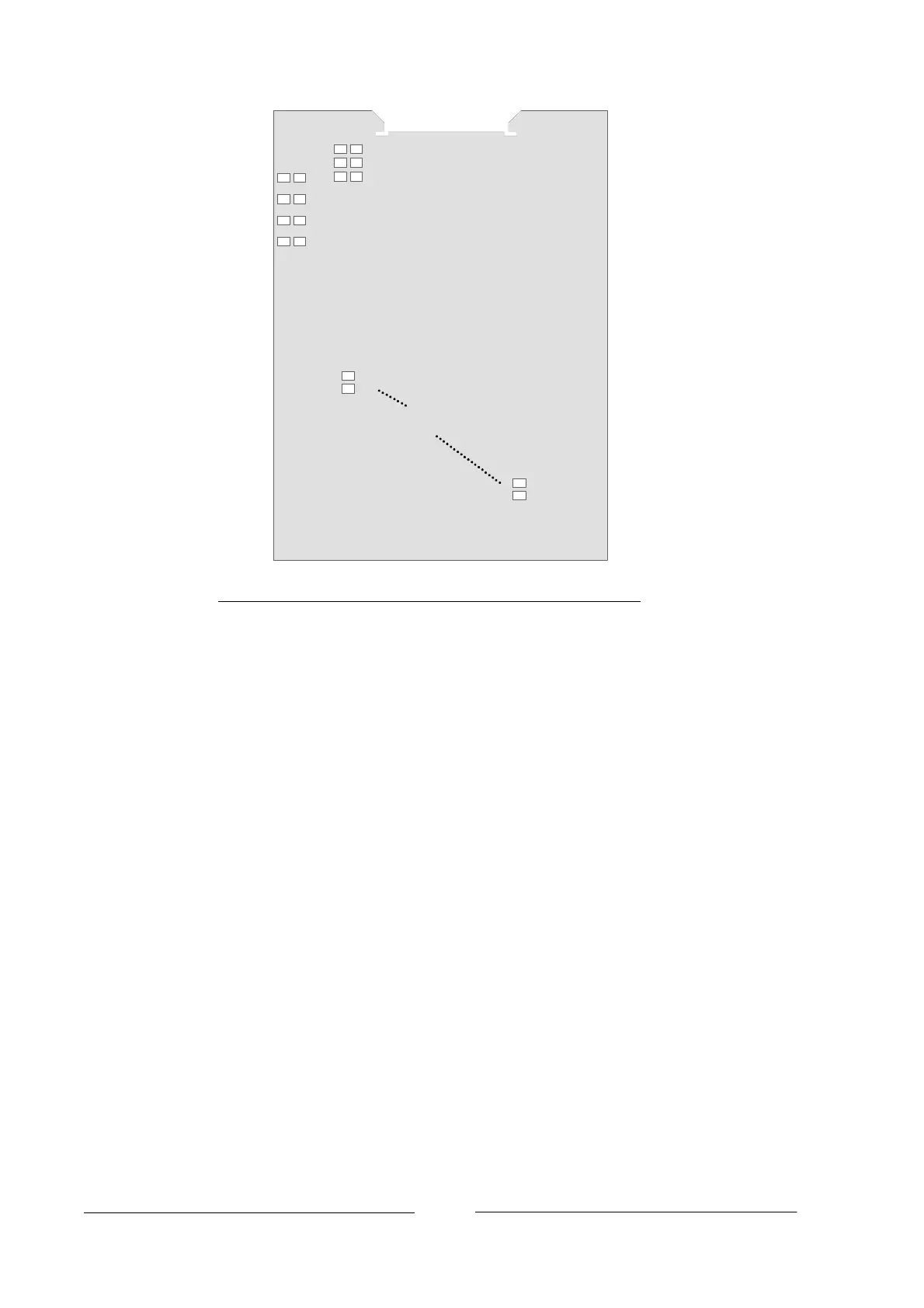
figure 4-1: Soldering jumper for activation of the bus
terminations, error shutdown, and repeater off-time
5. Configuration of the Error Detection
The separation of a defective network segment is made after reception of a
permanent dominant level for more than 20 bit times. The separated network
will be reconnected after reception of a recessive bit. The duration of the 20 bit
times depends on the soldering jumpers according to the figure 4-1. Only 1
Jumper must be closed.
The duration of the 20 bit times is measured of the data rate ratio of the
soldering jumpers. Please choose a bit rate jumper next to used bitrate. Default
configuration is a closed soldering jumper >5k Bit.
6. Configuration of repeater off-time
If CAN segments has a high capacitance load, discharge of CAN levels could not
be completed during the repeater off-time. This effects could arise at long cable
length or high number of CAN nodes. This could cause a disturbances on the
CAN network. For adoptions to such circumstances the repeater off-time could
be enlarged by soldering jumpers according figure 4-1.
Attention: Only one soldering jumper shall be closed. To enlarge the off-time of
the repeater also means to enlarge the round trip delay trough the repeater.