Features II JS/JSR4400N SCARA Robot
JSG GANTRY Robot
JR2000N Desktop Robot
47
Wait Condition: waitCond, waitCondTime, timeUp, endWait
This section explains the point job data commands for waiting until the sensor (connected to #genIn2)
is turned on. These commands belong to the category [Wait Condition].
Command Category Command Parameter Job
waitCondTime Wait Time Wait the condition for a set period.
timeUp – Execute when time is up.
endWait – End of wait command
Wait Condition
waitCond – Wait the condition.
z The wait condition commands are deactivated at the points whose point type or base type is set to
[CP Passing Point].
z Be sure to put a conditional command after the waitCond or waitCondTime command.
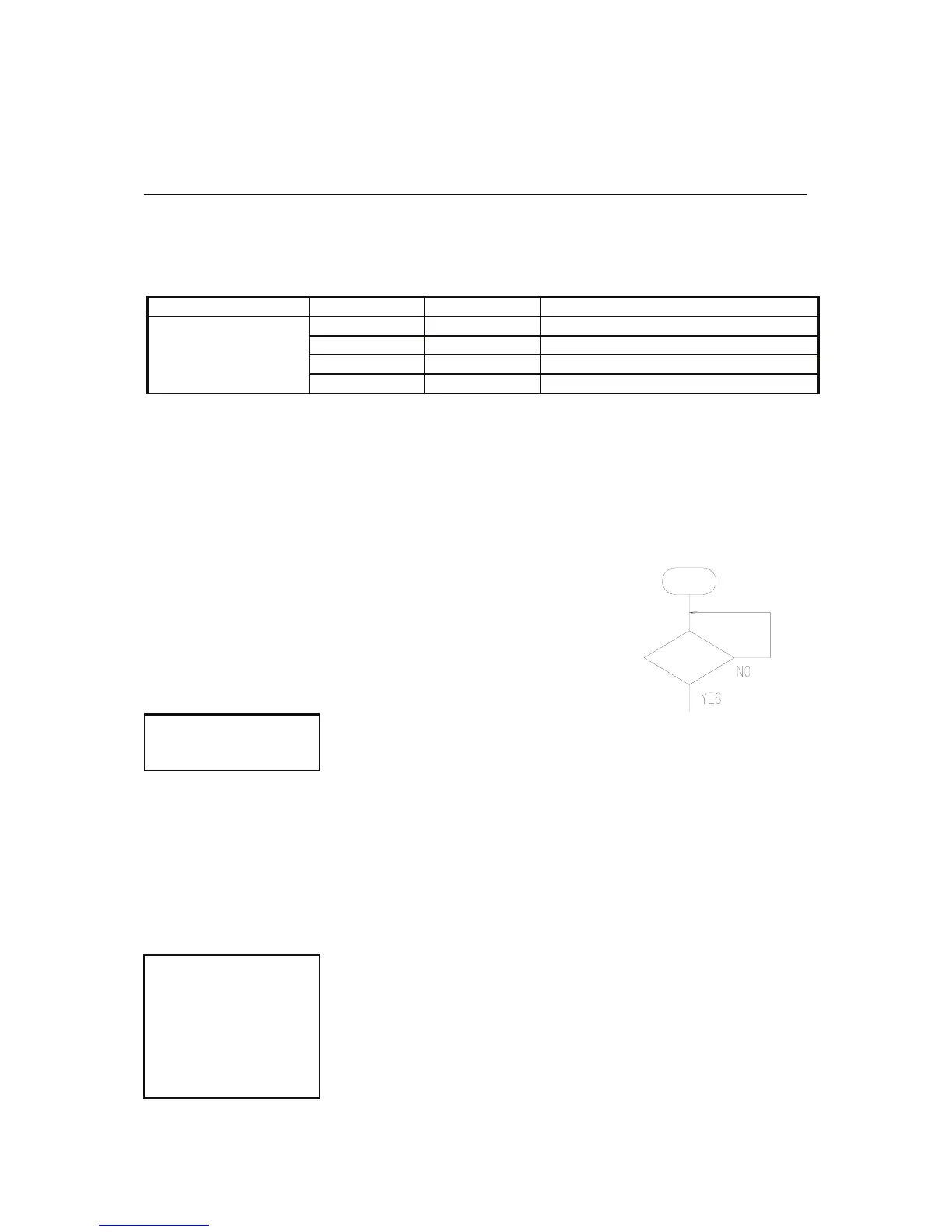
Following are some examples where the wait condition commands are used:
waitCond … endW ait: Wait until conditions are met.
e.g. A workpiece exists. Æ Sensor (#genIn2) ON
A workpiece does not exist. Æ Sensor (#genIn2) OFF
waitCond
ld #genIn2
endWait
Stand by at the point until the following conditions are met:
#genIn2=ON (Condition)
End of the condition line
waitCondtime … timeUp … endWait: Wait for the specified period of time until conditions
are met.
e.g. If the workpieces do not come within 30 seconds, it is recognized as an error, an external lamp
(connected to #genOut2) comes on, and the robot stands by until a start signal comes.
To restart operation, fix the problem and press the start button.
waitCondTime 3000
ld #genIn2
timeUp
set #genOut2
waitStartBZ
reset #genOut2
endWait
Wait for 3 seconds until the following condition is met:
#genIn2=ON (Condition)
If the condition is not met within 3 seconds,
Output ON signal to #genOut2,
Stand by in place until a start signal comes.
Output OFF signal to #genOut2 when a start signal comes.
End of the line for commands if the condition is not met for another 3
seconds.
Condition

 Loading...
Loading...