Page 9Page 8
2.6 Rudder Movement (Gain)
The Wheelpilot uses highly advanced steering soft-
ware, which constantly assesses how the vessel is
being affected by the prevailing conditions. By
adjusting its own performance, the pilot is able to
maintain the most accurate course for these condi-
tions, just as a human pilot would. Thus, in a rough
sea the pilot is not overworked and battery drain is
kept to a minimum.
The pilot will make corrections to compensate for
heading errors, in order to keep the boat on course.
The amount of rudder correction made is set by the
Gain (sometimes referred to as the rudder ratio).
The Gain setting can be compared to driving a motor
vehicle - at high speeds, very little wheel movement
is necessary to steer the vehicle (LOW gain). When
driving at slow speeds, more wheel movement is
necessary (HIGH gain).
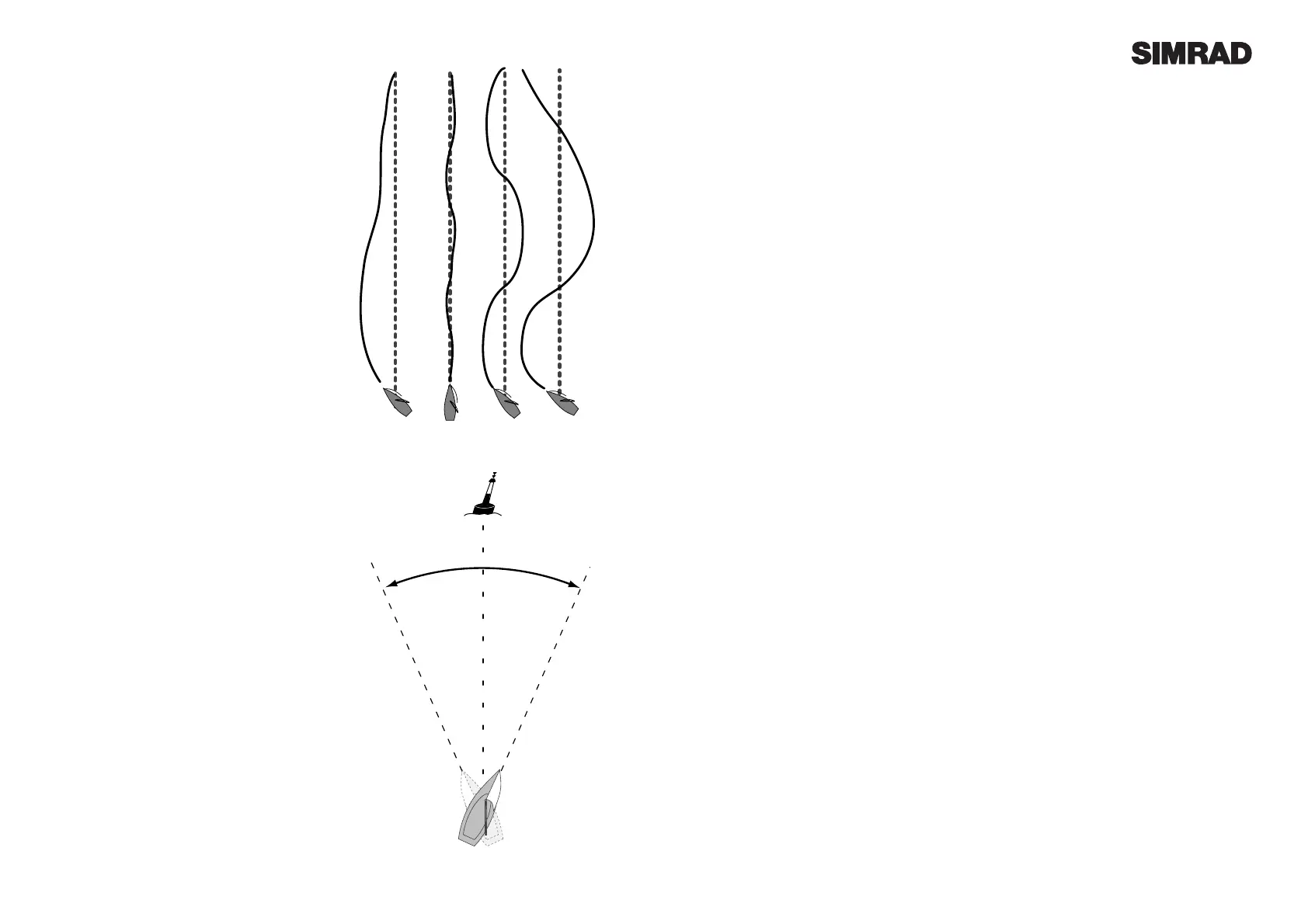
Fig 2.5A shows the effect of setting the Gain too
low: the boat takes a long time to return to the cor-
rect heading. Fig 2.5B is ideal, where errors are
quickly corrected. Fig 2.5C occurs when the Gain
too high, causing the boat to ÒSÓ, or oscillate
around the correct heading. Excessive Gain (Fig
2.5D) causes instability of course, leading to
increasing error.
To adjust Gain, please refer to section 4.3.
2.7 Seastate
In rough weather, more variations in heading will be
detected by the Wheelpilot due to the heavy seas
yawing the vessel. If no account of this was taken,
then the Wheelpilot would be overworked, causing
unnecessary strain on the unit and excessive drain
on the batteries. All Simrad Wheelpilots will contin-
uously monitor corrections applied to the wheel
over the course of a voyage, and allow a Òdead
bandÓ within which the boat can go off course with-
out corrections being made (Fig 2.6).
The dead band is automatically set and updated
by the Wheelpilot to give the best compromise
between course holding and battery consumption.
However, this can be manually set if so desired.
To manually adjust the Seastate, please refer to
section 4.4.
Fig 2.5 - Effects of Gain setting
2.8 Autotrim
Under differing conditions a rudder bias (sometimes known as standing helm or rudder trim) is
applied in order to steer a straight course. An example is when sailing close hauled where the ves-
sel will normally pull into the wind, and the helmsman applies a standing helm to leeward in order
to maintain course. The amount of this standing helm varies according to factors such as strength
of wind, boat speed, sail trim and amount of sail set. If no account of these were taken, then the
vessel would tend to veer off course, or pull round head to wind if sailing close hauled.
The Wheelpilot continuously monitors the average course error and applies a bias to the wheel to
compensate until the optimum condition is reached. This bias or standing helm is applied gradu-
ally, so as not to upset the normal performance of the Wheelpilot. Thus, it may take up to a minute
or so to fully compensate after changing tack. Once optimum trim is reached, the pilot will still
monitor for changes in the prevailing conditions and update the trim accordingly.
 Loading...
Loading...