Page 13Page 12
4 Configuration
4.1 Scaling
Before using the Wheelpilot, it is necessary to pro-
gram in the steering sensitivity, which is related to
the number of turns that the wheel makes between
end stops. This will determine the amount of
steering correction the Wheelpilot applies.
With the power OFF, press and hold the TAC K
and NAV keys and switch on the power. Both
Port and Starboard LEDs will illuminate, the Nav
LED will flash, and a repeated sequence of beeps
will be heard. The number of flashes and beeps in
the sequence indicates the current scaling factor.
The scaling factor is the total number of half turns
from lock to lock. For example, if the wheel has
three complete turns from lock to lock, the scaling
factor will be 6. If there are 1
1
Ú2 turns from lock to
lock, then the factor will be 3.
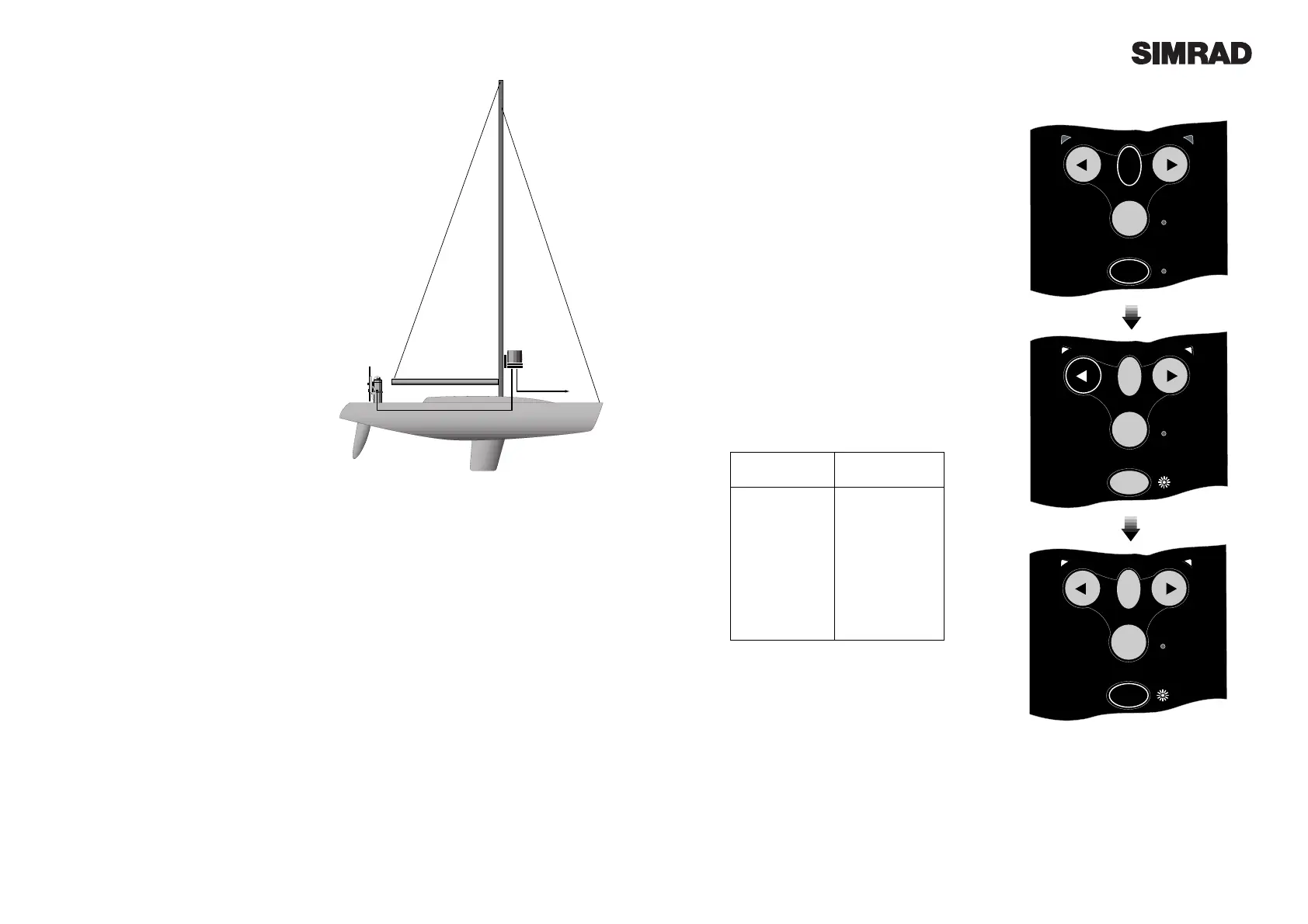
Press the Starboard key to increase the scaling fac-
tor by one, to a maximum value of 10 (= 5 turns
lock to lock). Press the Port key to decrease the
scaling factor by one, to a minimum value of 2 (= 1
turn lock to lock).
To confirm scaling setting and return to Standby
Mode, press the NAV key.
Fig 4.1 - Reducing scaling factor by one
POWER
ON
3.3 Using External Compass
Normally, the accurate operation of a self-con-
tained autopilot is very difficult on a ferrous
hulled boat (steel, ferro cement etc) as the hull
will affect the bearing read by the internal flux-
gate compass.
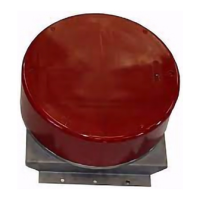
Although the WP30 Wheelpilot operates using
a built-in fluxgate compass it has the facility to
accept data from an external source - the
Navico Corus ATC600 active compass.
On a steel or ferro hulled boat, the correct loca-
tion for the ATC600 would be on the mast,
between 1 and 2 metres above the deck (Fig 3.5).
On a non-ferrous hulled boat, the ATC600
should be situated low down ,as near the centre
point of the boat as possible, but away from any
sources of magnetic interference such as speak-
ers etc.
The ATC600 is connected to the WP30 via the
Navico Corus Network connection. Note that in
order to operate, the ATC600 will require a sepa-
rate 12v power supply through a CPC02 or
CPC05 power cable.
Once connected, the Wheelpilot will automati-
cally accept bearing data from the ATC600
active compass transducer in preference to the
internal fluxgate compass.
 Loading...
Loading...