D
D
C
C
S
S
8
8
1
1
0
0
S
S
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 17 Website: www.leadshine.com
Attention: When above protections are active, the motor shaft will be free or the
LED will turn red. Reset the driver by repowering it (ERR/RES signal only can be
used to clear “Position Following Error Protection” error.) to make it function
properly after removing above problems. Since there is no protection against power
leads (﹢,﹣) reversal, it is critical to make sure that power supply leads correctly
connected to driver. Otherwise, the driver will be damaged instantly.
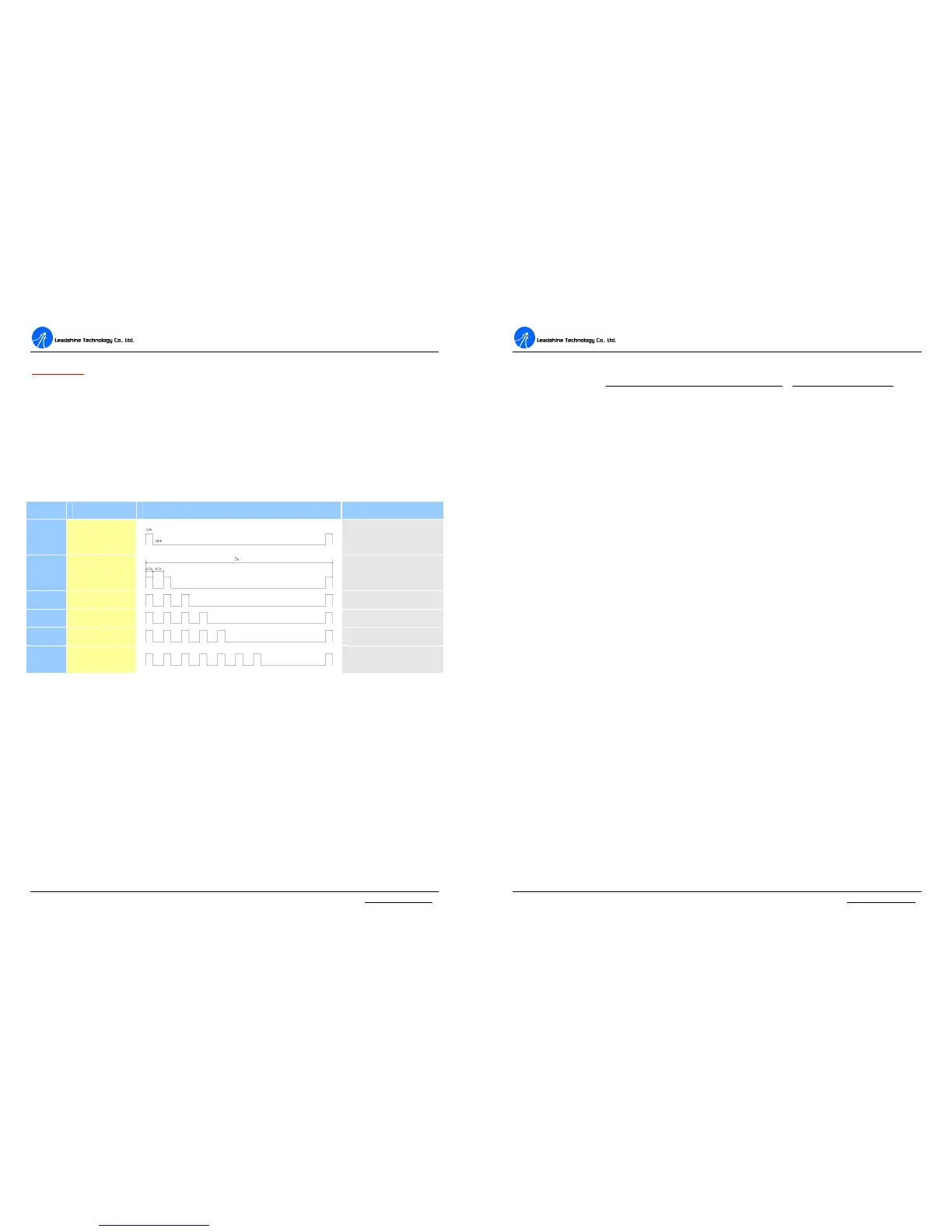
Protection Indications
Priority
Time(s) of ON Sequence wave of RED LED Description
1
st
1
Over-current protection
2
nd
2
Over-voltage protection
3
rd
3
Under-voltage protection
4
th
4
Phase error protection
5
th
5
Encoder error protection
6
th
7
Position following error
protection
Changing Default Motor Direction
The DCS810S will turn the motor in the CW direction when the direction input is
“high” (logical “1”). If instead CCW is preferred, then:
1) Reverse the “motor +” and “motor -” leads.
2) Reverse the encoder “Channel A” and “Channel B” leads.
Maximum Pulse Input Frequency
Maximum Pulse Input Frequency is the highest frequency that the driver can accept.
To convert this frequency to RPM, use the following formula:
D
D
C
C
S
S
8
8
1
1
0
0
S
S
D
D
i
i
g
g
i
i
t
t
a
a
l
l
D
D
C
C
S
S
e
e
r
r
v
v
o
o
D
D
r
r
i
i
v
v
e
e
r
r
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 18 Website: www.leadshine.com
atordenoCAM
numeratorCAM
CountLineEncoder
FrequenceInputPulseMax
RPM
min_
_
4)(
60)(
(max) ×
×
×
=