Logosol Multifunctional Servo Drive LS-231SE
Doc # 712231004 / Rev. A, 05/05/2011
Logosol, Inc. • 1155 Tasman Drive • Sunnyvale, CA 94089 Tel: (408) 744-0974 • www.logosolinc.com
51
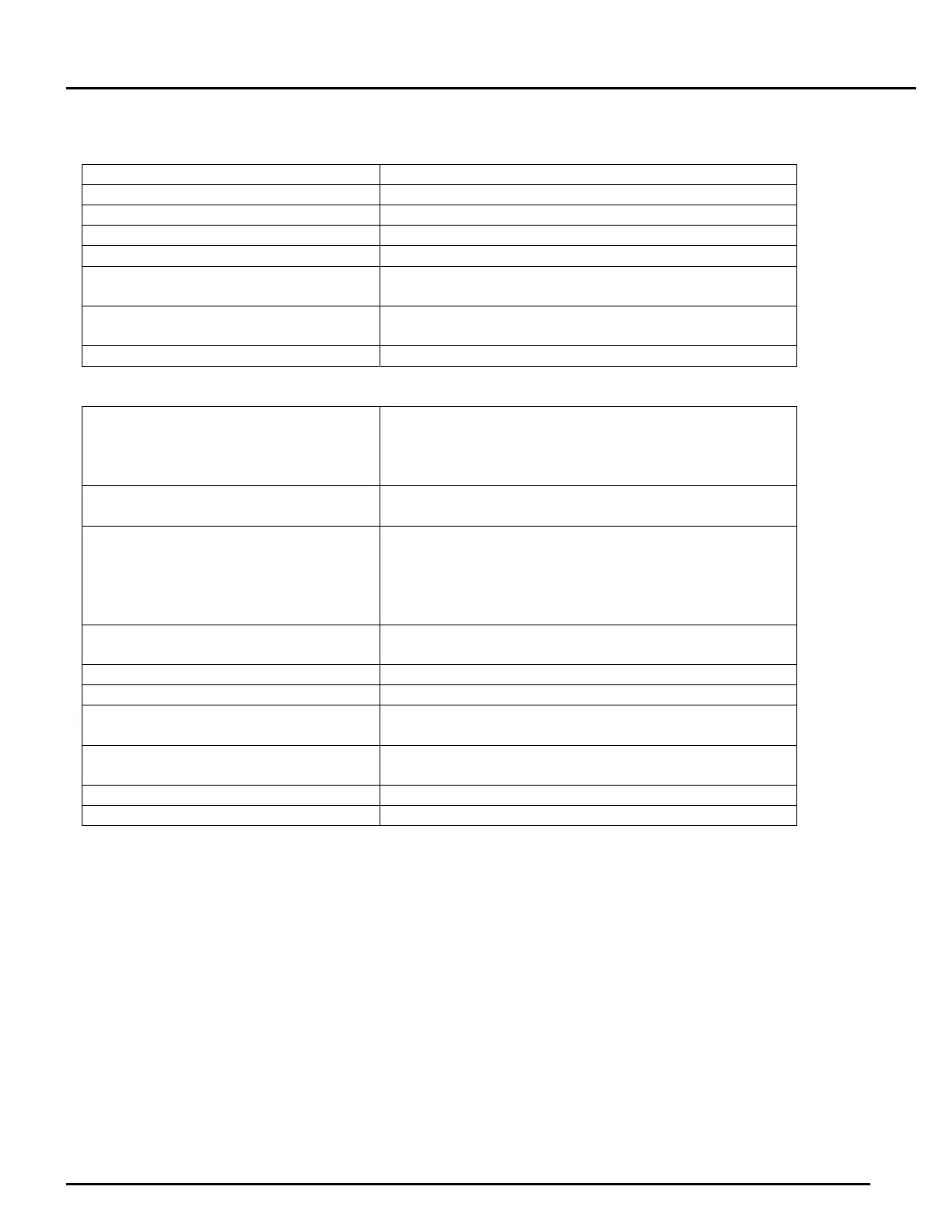
Procedure Initialize
AA FF 0F 0E Hard reset
AA 00 21 01 FF 21 Set address
AA 00 21 02 FF 22 Search for more modules until no response received
AA 01 13 20 34 Read Device ID and Version number
AA 01 13 FF 13 Read all status data
AA 01 E6 64 00 00 04 00 00 00 00
FF 00 00 08 01 00 57
Set Gain parameters
AA 01 E4 9F 00 00 00 00 00 00 00
00 01 00 00 00 00 85
Set Trajectory parameters
AA 01 17 05 1D Close servo loop
Procedure FindHomePosition
AA 01 E6 C8 00 20 03 46 00 28 00
FF 00 40 1F 01 00 9F
Set gain parameters: KP=200, KD=800, KI=70,
IL=40, Output limit=255, current limit =0, Position
error limit=8000, Servo rate divisor=1 amplifier
deadband compensation=0
AA 01 17 09 21 Close the servo loop (Stop smoothly and amplifier
enable)
AA 01 94 36 25 06 01 00 22 00 00
00 19
Load trajectory: Velocity mode, Forward direction,
Velocity=1 revolution per second (67109
programmed velocity for 5000 line encoder),
Acceleration = 10 revolutions per second
2
(34
programmed acceleration for 5000 line encoder)
AA 01 19 12 2C Set home mode - capture home position on change
of Limit 1 and stop abruptly
AA 01 05 06 Start motion
wait while home_in_progress bit=1 Home position is found on change of Limit 2
AA 01 19 18 32 Set home mode - capture home position on change
of Index and stop abruptly
AA 01 94 77 25 06 01 00 58 01 00
00 91
Load trajectory: Velocity mode, Reverse direction
AA 01 05 06 Start motion
wait while home_in_progress bit=1 Home position is found on change of Index
Calculation of programmed velocity and acceleration for servo rate divisor = 1:
Vel = (encoder counts per revolution) x (number of revolutions per second) x 3.3554432
Acc = (encoder counts per revolution) x (number of revolutions per second
2
) x 0.00017179869
For this example (5000 lines encoder – 20000 encoder counts per revolution):
Vel = 20000 x 1 x 3.3554432 = 67109 = 00010625h
Acc = 20000 x 10 x 0.00017179869 = 34 = 00000022h
 Loading...
Loading...