Logosol Multifunctional Servo Drive LS-231SE
Doc # 712231004 / Rev. A, 05/05/2011
Logosol, Inc. • 1155 Tasman Drive • Sunnyvale, CA 94089 Tel: (408) 744-0974 • www.logosolinc.com
50
Examples of Managing Two Servo Drives
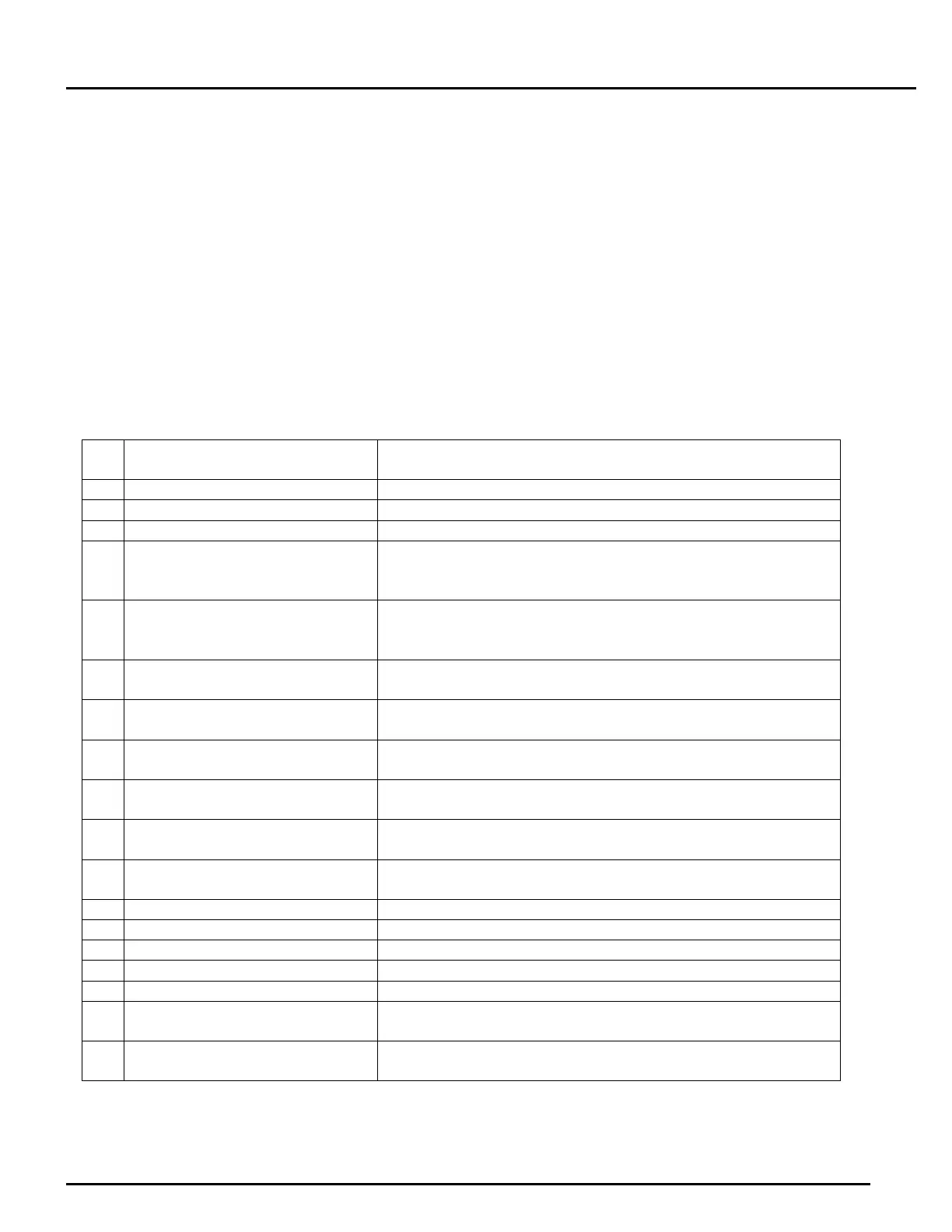
# 1 – Resets all modules with group command.
# 2 and # 3 - Set the addresses of drives 1 and 2.
# 4 and # 6 - Set PID parameters of drives 1 and 2.
# 6 and # 7 - Starts motion in trapezoidal mode with target position=0, velocity=0, acceleration=1
and PWM=0.
# 8 and # 9 - Close servo loops of drives 1 and 2. Initialization is complete at this point.
# 10 and # 10 - Load trajectories (positions, velocities and accelerations) for drives 1 and 2.
# 12 and # 13 - Load and execute new trajectory for drive 1.
# 14 and # 15 - Read additional status bytes from drives 1 and 2.
# 16, # 17 and #18 - Load new trajectories for drives 1 and 2 and execute them with one command
sent to the drives’ group address.
Examples
# Hexadecimal code of
command
Comments
1 AA FF 0F 0E Hard Reset
2 AA 00 21 01 FF 21 Set Address 01h for drive 1. Group address=FFh.
3 AA 00 21 02 FF 22 Set Address 02h for drive 2. Group address=FFh.
4 AA 01 E6 64 00 00 04 00 00
00 00 FF 00 00 08 01 00 57
Set Gains of drive 1 – defines PID parameters: KP=64h,
KD=400h, KI=00h, IL=00h, OL=FFh, CL=00h, EL=800h,
SR=01h, DC=00h.
5 AA 02 E6 64 00 00 04 00 00
00 00 FF 00 00 08 01 00 58
Set Gains of drive 2 – defines PID parameters: KP=64h,
KD=400h, KI=00h, IL=00h, OL=FFh, CL=00h, EL=800h,
SR=01h, DC=00h.
6 AA 01 E4 9F 00 00 00 00 00
00 00 00 01 00 00 00 00 85
Load trajectory for drive 1 – target position=0, velocity=0,
acceleration=1, PWM=0 and start motion now
7 AA 02 E4 9F 00 00 00 00 00
00 00 00 01 00 00 00 00 86
Load trajectory for drive 2 – target position=0, velocity=0,
acceleration=1, PWM=0 and start motion now
8 AA 01 17 05 1D Stop Motor - closes servo loop of drive 1 with Power Driver
enable and Stop Abruptly in Command byte.
9 AA 02 17 05 1E Stop Motor - closes servo loop of drive 2 with Power Driver
enable and Stop Abruptly in Command byte.
10 AA 01 E4 9F 00 00 00 00 00
80 01 00 64 00 00 00 00 69
Load Trajectory of drive 1 with Pos=0000h, Vel=18000h,
Acc=6400h, PWM=00h, servo mode=1.
11 AA 02 E4 9F 00 00 00 00 00
80 01 00 64 00 00 00 00 6A
Load Trajectory of drive 2 with Pos=0000h, Vel=18000h,
Acc=6400h, PWM=00h, servo mode=1.
12 AA 01 54 11 00 28 00 00 8E Load Trajectory of drive 1 with new position=2800h.
13 AA 01 05 06 Start Motion - executes previously loaded trajectory.
14 AA 01 13 05 19 Read Status from drive 1 (plus position and velocity).
15 AA 02 13 05 1A Read Status from drive 2 (plus position and velocity).
16 AA 01 54 11 20 4E 00 00 D4 Load Trajectory of drive 1 with new position=4E20h.
17 AA 02 54 11 E0 B1 FF FF F6 Load Trajectory of drive 2 with new
position=FFFFB1E0h (-4E20h).
18 AA FF 05 04 Start Motion – executes previously loaded trajectories.
The command is sent to the drives’ group address FFh.
 Loading...
Loading...