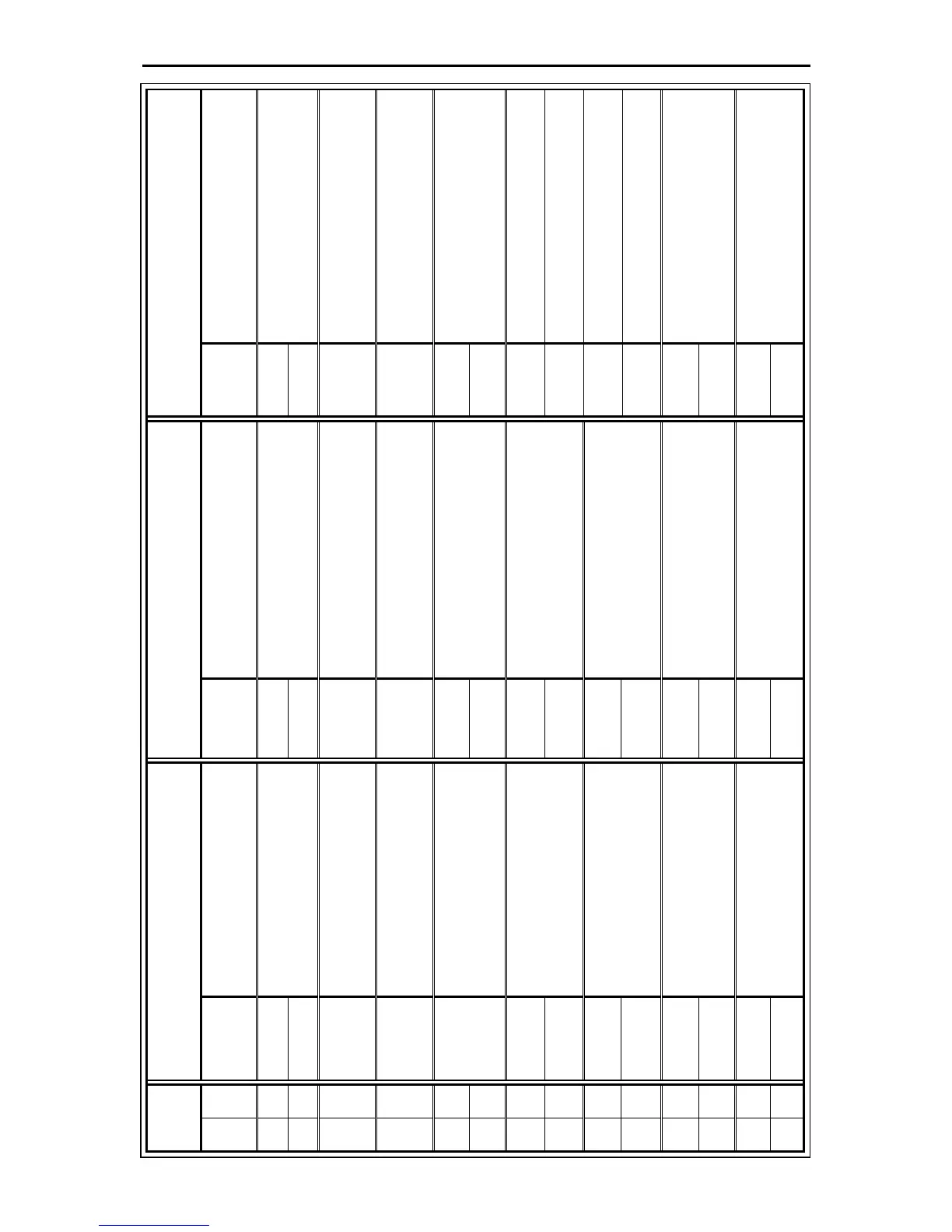
Digital incremental encoder
Motor temperature sensor, normally
closed contact, PTC, NTC, KTY...
Sensor cables for encoder supply
Supply voltages for high-resolution
incremental encoder
Reference potential encoder supply and
motor temperature sensor
Reset pulse trace signal (differential)
from high-resolution and digital
incremental encoder
Phase U hall sensor for commutation
Phase V hall sensor for commutation
Phase W hall sensor for commutation
A trace signal RS422 (differential) from
digital incremental encoder
B trace signal RS422 (differential) from
digital incremental encoder
MT+
U_SENS+
U_SENS-
US
GND
N
#N
H_U
H_V
H_W
A
#A
B
#B
Analog incremental encoder
Motor temperature sensor, normally
closed contact, PTC, NTC, KTY
Sensor cables for encoder supply
Supply voltages for high-resolution
incremental encoder
Reference potential encoder supply and
motor temperature sensor
high-resolution incremental encoder
COSINE commutation signal
(differential) from high-resolution
incremental encoder
SINE commutation signal (differential)
from high-resolution incremental encoder
COSINE trace signal (differential) from
high-resolution incremental encoder
SINE trace signal (differential) from high-
resolution incremental encoder
MT+
U_SENS+
U_SENS-
US
GND
R
#R
COS_Z1*
#COS_Z1*
SIN_Z1*
#SIN_Z1
COS_Z0*
#COS_Z0*
SIN_Z0*
#SIN_Z0*
Incremental encoder with serial communication
interface (e.g. EnDat, HIPERFACE)
Motor temperature sensor, normally
closed contact, PTC, NTC, KTY
Sensor cables for encoder supply
Supply voltages for high-resolution
incremental encoder
Reference potential encoder supply
and motor temperature sensor
Bidirectional RS485 data line
(differential) (EnDat / HIPERFACE)
Clock output RS485 (differential)
(EnDat)
COSINE trace signal (differential)
from high-resolution incremental
encoder
SINE trace signal (differential) from
high-resolution incremental encoder
MT+
U_SENS+
U_SENS-
US
GND
DATA
#DATA
SCLK
#SCLK
COS_Z0*
#COS_Z0*
SIN_Z0*
#SIN_Z0*
Pin No
9
10
11
12
13
14
15
1
2
3
4
5
6
7
8
*) Heidenhain encoder: A = SIN_Z0; B = COS_Z0; C = SIN_Z1; D = COS_Z1