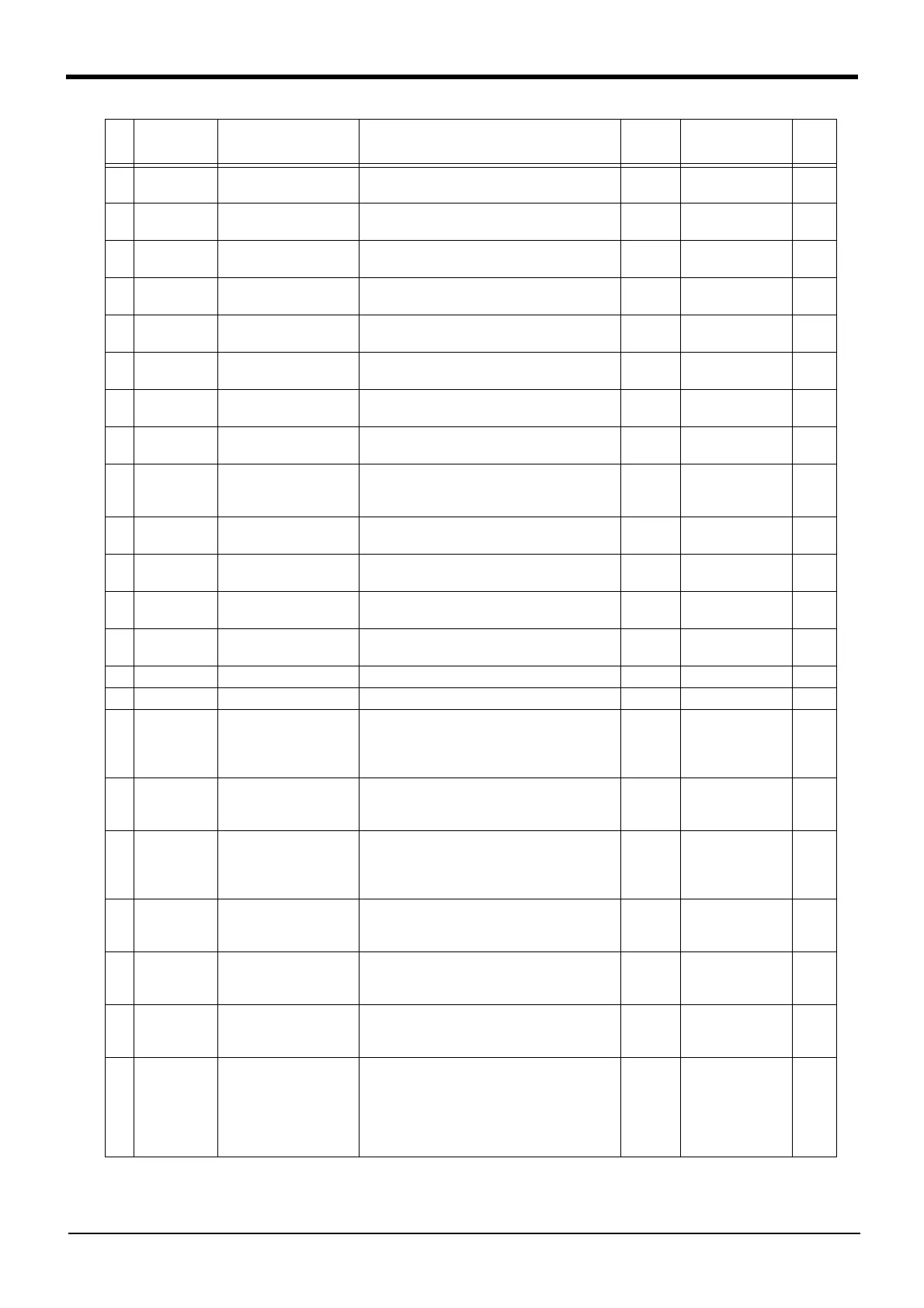
4-158 Robot status variables
4MELFA-BASIC V
69 J_Origin Mechanism No.(1 to 3)
Returns the joint coordinate data when setting the
origin.
R Joint type 321
70 M_Open File No.(1 to 8) Returns the open status of the specified file
or the communication line.
R Integer type 350
71 C_Mecha Mechanism No.(1 to 3)
Returns the type name of the robot. R Character string
type
314
72 C_Maker None
Shows manufacturer information (a string of up to
64 characters).
R Character string
type
313
73 C_User None
Returns the content of the parameter
"USERMSG."(a string of up to 64 characters).
R Character string
type
315
74 C_Date None
Current date expressed as "year/month/date". R Character string
type
313
75 C_Time None
Current time expressed as "time/minute/second". R Character string
type
315
76 M_BTime None
Returns the remaining battery capacity time
(hours).
R Integer type, Time 324
77 M_Timer Timer No. (1 to 8)
Constantly counting. Value can be set. [ms]
It is possible to measure the precise execution
time by using this variable in a program.
RW Single-precision
real number type
366
78 P_Zero None
A variable whose position coordinate values (X, Y,
Z, A, B, C, FL1, FL2) are all 0
R Position type 396
79 M_PI None
Circumference rate (3.1415...) R Double-precision
real number type
356
80 M_Exp None
Base of natural logarithm (2.71828...) R Double-precision
real number type
336
81 M_G None
Specific gravity constant (9.80665) R Double-precision
real number type
337
82 M_On None
1 is always set R Integer type 349
83 M_Off None
0 is always set R Integer type 349
84 M_Mode None
Contains the status of the key switch of the
operation panel
MANUAL/AUTOMATIC (O/P)/AUTOMATIC
(External)=(1/2/3)
R Integer type 348
85 M_SplPno Mechanism No.(1 to 3)
During the spline interpolation movement, the
transit point No. passed through most recently is
returned.
R Integer type 363
86 M_SplVar Mechanism No.(1 to 3)
During the spline interpolation movement, a
random numeric value set for the transit point is
returned. The random value can be held until the
value is set again.
RW Integer type 364
87 P_WkCord Work coordinates No.
(1 to 8)
By designating a work coordinates number, work
coordinates values concerned are read, or work
coordinate values are specified.
RW Position type 395
88 M_ESpd Mechanism No.(1 to 3)
During the Ex-T control/Ex-T spline interpolation
movement, the transit speed at current Ex-T
coordinate system is returned.
R Single-precision
real number
type,mm/s
335
89 P_ECord Mechanism No.(1 to 3)
During the Ex-T control/Ex-T spline interpolation
movement, the Ex-T coordinate system origin data
currently used is returned.
R Position type 388
90 M_Gps Monitoring No. (1 to 8)
Returns the number of the position data stored in
the P_GpsX() for the monitoring number defined in
the Def Gps command, using the get-position-
quick function (GPS function). ("X" indicates the
same number as the target monitoring number
from 1 to 8.)
R Integer type 338
No
Variable
name
Array designation
Note1)
Details
Attribute
Note2)
Data type, Unit Page
 Loading...
Loading...



