4MELFA-BASIC V
List of Command 4-165
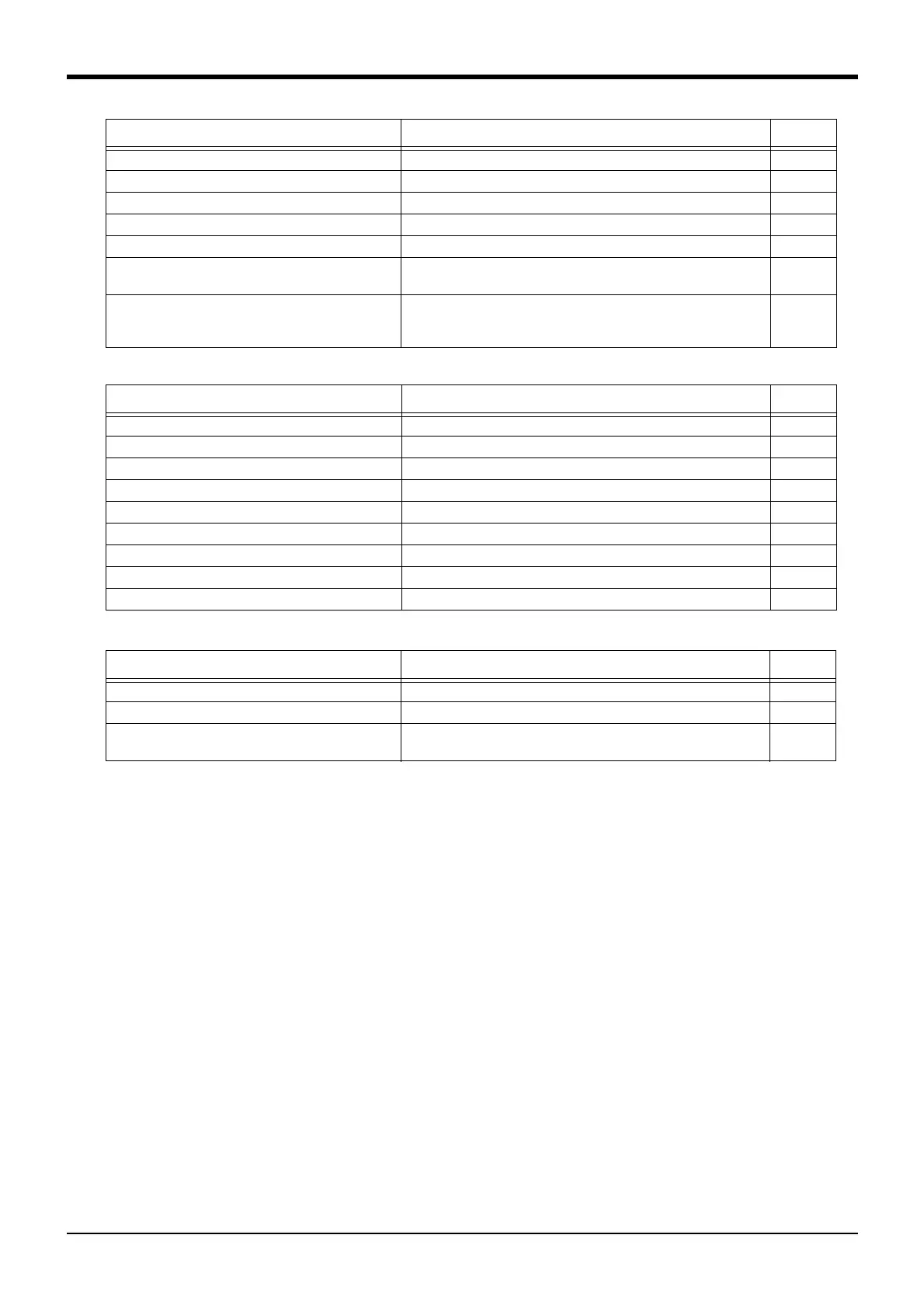
(4) Multi-task related
(5) Others
Def FN (Define function) User function definition 203
Title (Title) Program title setting 297
Base (Base) Robot base position setting 173
Tool(Tool) Tool length setting 298
SetCalFrm (Set Calibration Frame) Coordinate system setting used for frame transformation 289
Def Gps (Define get position) Definition of the monitored condition for the position data acquisi-
tion using the get-position-quick function (GPS function)
204
Def Map (Define mapping) Definition of the monitored condition for the mapping (the work-
piece presence recognition) in a cassette using the get-position-
quick function (GPS function)
209
Command Explanation
Page
XLoad (X Load) Loads a program to another task slot 305
XRun (X Run) Execute the program in another task slot 307
XStp (X Stop) Stop the program in another task slot 308
XRst (X Reset) Resets the program in another task slot being suspended 306
XClr (X Clear) Cancels the loading of the program from the specified task slot 304
GetM (Get Mechanism) Obtains mechanical control right 237
RelM (Release Mechanism) Releases mechanical control right 281
Priority (Priority) Changes the task slot priority 279
Reset Err (Reset Error) Resets an error (use of default is not allowed) 283
Command Explanation
Page
ChrSrch (Character search) Searches the character string out of the character array. 178
Get Pos (Get Position) Reserved.
-
PVSCal (PVS calibration) Changes the vision sensor image coordinate to the robot world
coordinate using the vision sensor calibration data.
280
Command Explanation
Page
 Loading...
Loading...



