4MELFA-BASIC V
Detailed explanation of command words 4-185
pulse of the target position, and will wait indefinitely for the completion of the operation instruction. As a
result, the program execution comes to a halt. Do not use the compliance mode and the Fine instruction
at the same time.
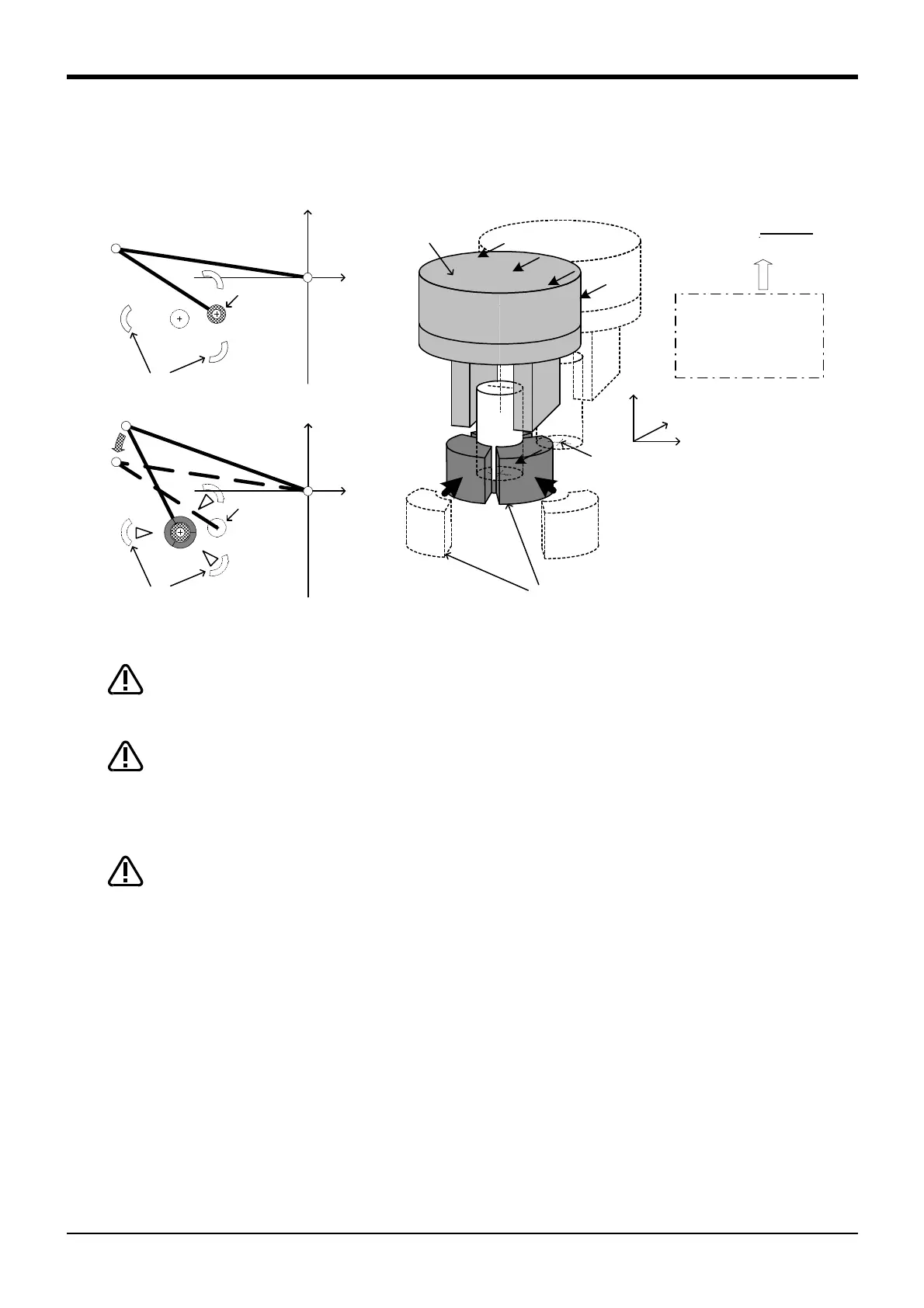
Fig.4-14:The example of compliance mode use
The compliance mode is in effect continuously until the Cmp Off instruction is
executed, or the power is turned off. Exercise caution when changing the execut-
able program number or operating the jog.
To execute a jog operation after setting the compliance mode with the Cmp Pos
instruction, use the XYZ jog mode.
If any other jog mode is used, the robot may operate in a direction different from
the expected moving direction because the directions of the coordinate systems
controlled by the jog operation and the compliance mode differ.
When performing the teaching of a position while in the compliance mode, per-
form servo OFF first.
Be careful that if teaching operation is performed with Servo ON, the original com-
mand position is taught, instead of the actual robot position. As a result, the robot
may move to a location different from what has been taught.
[Related system variables]
M_CmpDst
[Related instructions]
Cmp Off (Compliance OFF), CmpG (Compliance Gain), Cmp Tool (Compliance Tool), Cmp Jnt (Compliance
Joint)
Positioning device
+Y
+X
+Z
P2
Robot hand CMP POS, &B000011
CBAZYX
Soften the control of
axis X and Y in the
XYZ coordinates
system.
J2
+Y
+X
J4
J1
O
P2
Positioning device
J2
+Y
+X
J4
J1
O
P2
Positioning device
 Loading...
Loading...



