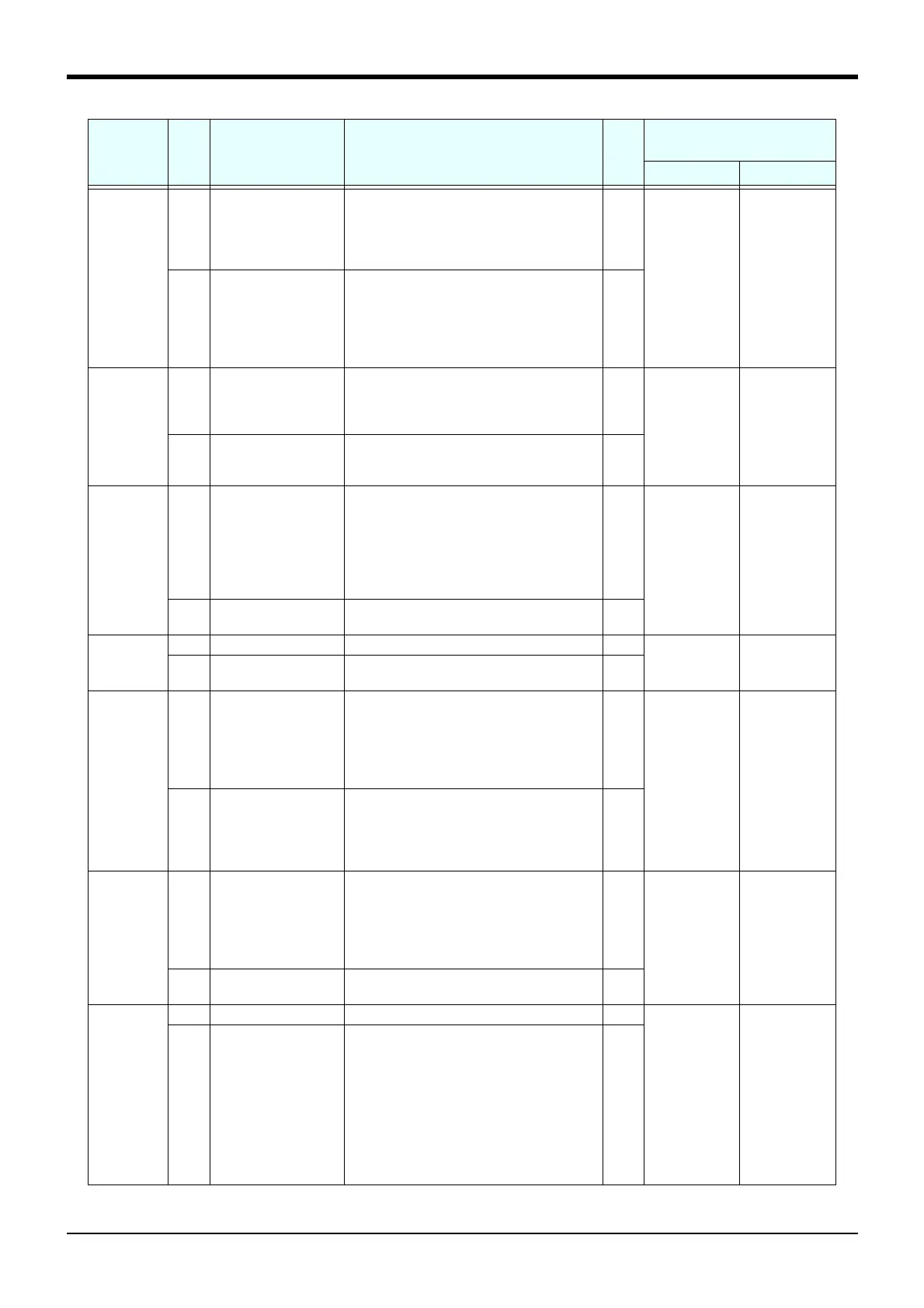
6External input/output functions
Dedicated input/output 6-561
SRVON
(Operation
right
required)
Input Servo ON input signal This input turns ON the servo power supply for
the robot.
With a multi-mechanism configuration, the
servo power supplies for all mechanisms will
be turned ON.
Edge 10010,
10010
4,
1
Output In servo ON output sig-
nal
This output turns ON when the servo power
supply for the robot is ON. If the servo power
supply is OFF, this output also remains OFF.
With a multi-mechanism configuration, this
output turns ON when the servo of at least one
mechanism is ON.
SRVOFF Input Servo OFF input signal This input turns OFF the servo power supply
for the robot.(Applicable to all mechanisms)
The servo cannot be turned ON while this sig-
nal is being input.
Level 10011,
10011
1,
-1
Output Servo ON disable out-
put signal
This output indicates a status where the servo
power supply cannot be turned ON. (Echo
back)
AUTOENA Input Automatic operation
enabled input
Disables automatic operation when inactive. If
this signal is inactive, and the AUTOMATIC
mode is entered, a low level error L5010 will
occur.
This input is used to interlock the operations
via the operation panel with the I/O signals.
Use of this input is not a requirement.
Level -1,
-1
-1,
-1
Output Automatic operation
enabled output
Outputs the automatic operation enabled
state.
CYCLE Input Cycle stop input signal Starts the cycle stop. Edge 10012,
10012
-1,
-1
Output In cycle stop operation
output signal
Outputs that the cycle stop is operating.
Turns OFF when the cycle stop is completed.
MELOCK
(Operation
right
required)
Input Machine lock input sig-
nal
Sets/releases the machine lock state for all
mechanisms.
This can be set or released when all slots are
in the program selection state.
Signal level will be set to Level when program
selection is enabled.
Level -1,
-1
-1,
-1
Output In machine lock state
output signal
Outputs the machine lock state.
This turns On when at least one mechanism is
in the machine lock state. During the machine
lock state, the robot will not move, and pro-
gram operation will be enabled.
SAFEPOS
(Operation
right
required)
Input Safe point return input
signal
Requests the safe point return operation.
This signal initiates a joint interpolation move-
ment to the position set by the parameter
"JSAFE." The speed is determined by the
override setting. Be careful not to interfere with
peripheral devices.
Edge 10013,
10013
-1,
-1
Output In safe point return out-
put signal
Outputs that the safe point return is taking
place.
BATERR Input - - -1(No meaning),
10014
-1(No meaning),
-1
Output Battery voltage drop Outputs that the controller battery voltage is
low. The output is turned off when the control-
ler power supply is reconnected after the bat-
tery replacement.
*The cumulative time where the controller
power supply is turned off exceeds 14600
hours.
The output is turned off if the battery depletion
time is reset.
Parameter
name
Class Name Function
Signal
level
Note1)
Factory shipment signal number.
Input, output
CR7xx-Q CR7xx-D
 Loading...
Loading...



