5 - 184
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
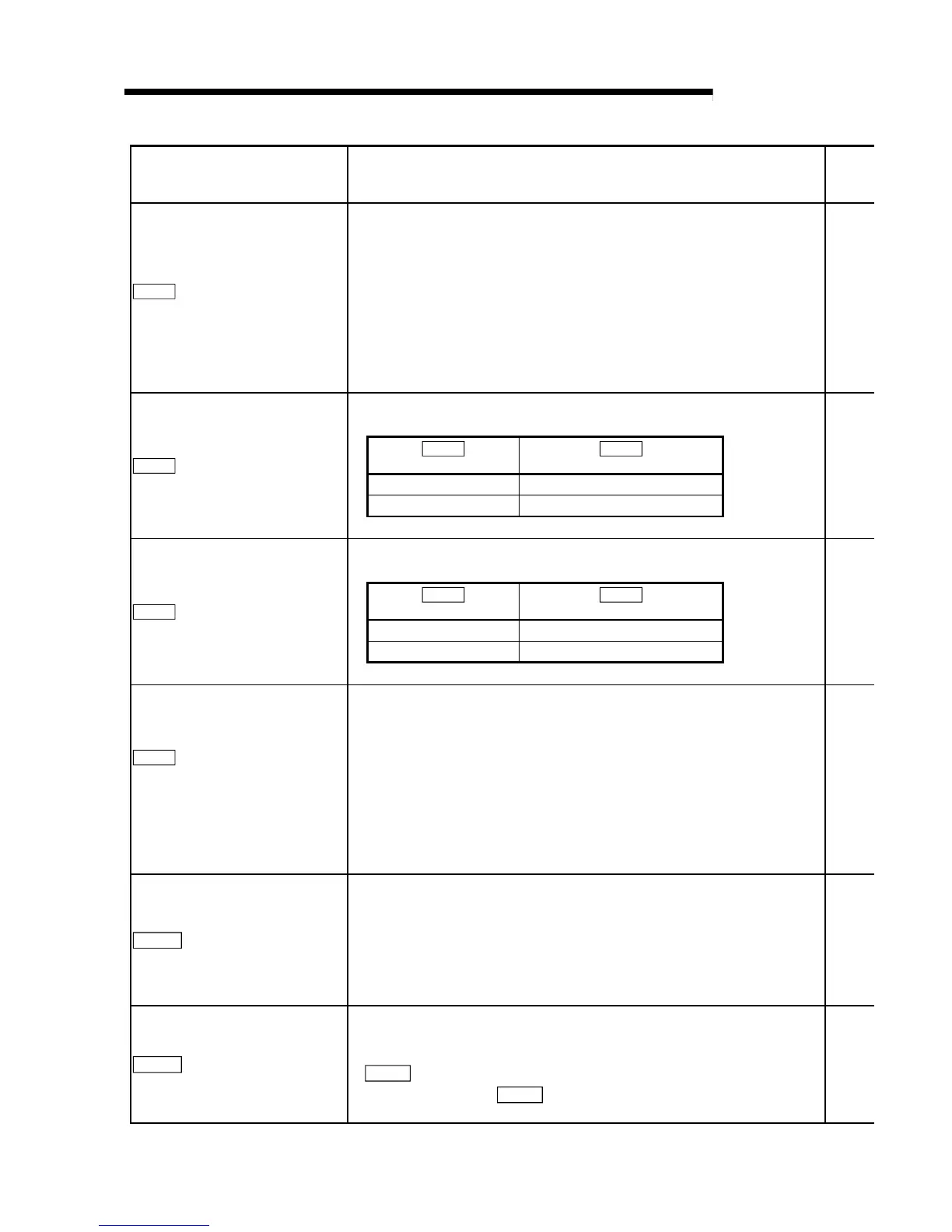
Setting item Setting details
Cd.32
Interrupt request during
continuous operation
•
To interrupt the operation during continuous operation, set "1".
•
If the interrupt request is received after setting "1", "0" will be automatically stored
by the OS.
•
When changing the acceleration time during speed change, set the new
acceleration time.
Pr.25
setting
Cd.33
setting range (unit)
1-word type 0 to 65535 (mm)
2-word type 0 to 8388608 (ms)
Cd.33
New acceleration time value
•
When changing the deceleration time during speed change, set the new
deceleration time.
Pr.25
setting
Cd.33
setting range (unit)
1-word type 0 to 65535 (mm)
2-word type 0 to 8388608 (ms)
Cd.34
New deceleration time value
Cd.35
Acceleration/deceleration
time change during speed
change, enable/disable
selection
•
Set whether to enable/disable the acceleration/deceleration time change during
speed change.
Cd.100
Servo OFF command
•
Set "1" when it is desired to switch the servo OFF (free run status) during
positioning standby.
•
During positioning operation, the servo OFF command is invalid.
(However, if the servo amplifier results in error during positioning operation, the
servo OFF command is made valid immediately.)
Cd.101
Torque output setting value
•
Set the torque to be output by the servomotor.
•
This value is the torque limit setting value when the setting value is greater than
"
Pr.18
Torque limit setting value".
•
When this value is "0", "
Pr.18
Torque limit setting value" is output.

 Loading...
Loading...







