4.
A2ccPu
/MELSEC-A
1
4.2.3
Running and
Stopping
the
AX
from
external
devices
(Remoto
RUN/STOP
function)
The RUN switch is used for A2CCPU run/stop control. The
operation "remote RUWSTOP" means controlling of A2CCPU
run/stop with external signals (peripheral devices, remote RUN
contact) with the RUN switch placed
in
the RUN position.
(1)
Application of remote RUN/STOP
Remote RUNSTOP control is possible
in
the following cases.
(a)
The A2CCPU is out of reach.
(b) The A2CCPU is located in a control box.
(2)
Operation
Execution
of
sequence program operation is controlled as
indicated below
in
response to the remote RUN/STOP opera-
tion.
(a)
Remote stop
..*4..
The A2CCPU stops after the sequence
program is executed to the EN0 (FEND)
instruction.
(b) Remote RUN*.-*.* The sequence program is executed
again from step
0
by the remote RUN
operation after the A2CCPU has been
stopped by the remote STOP operation.
(3)
Executing remote RUN/STOP
Remote RUN/STOP operation is possible by the following
methods:
(a)
Remote RUN contacts
Remote RUN/STOP control is possible
by
turning
on and
off
the remote RUN contacts which are set with para-
meters.
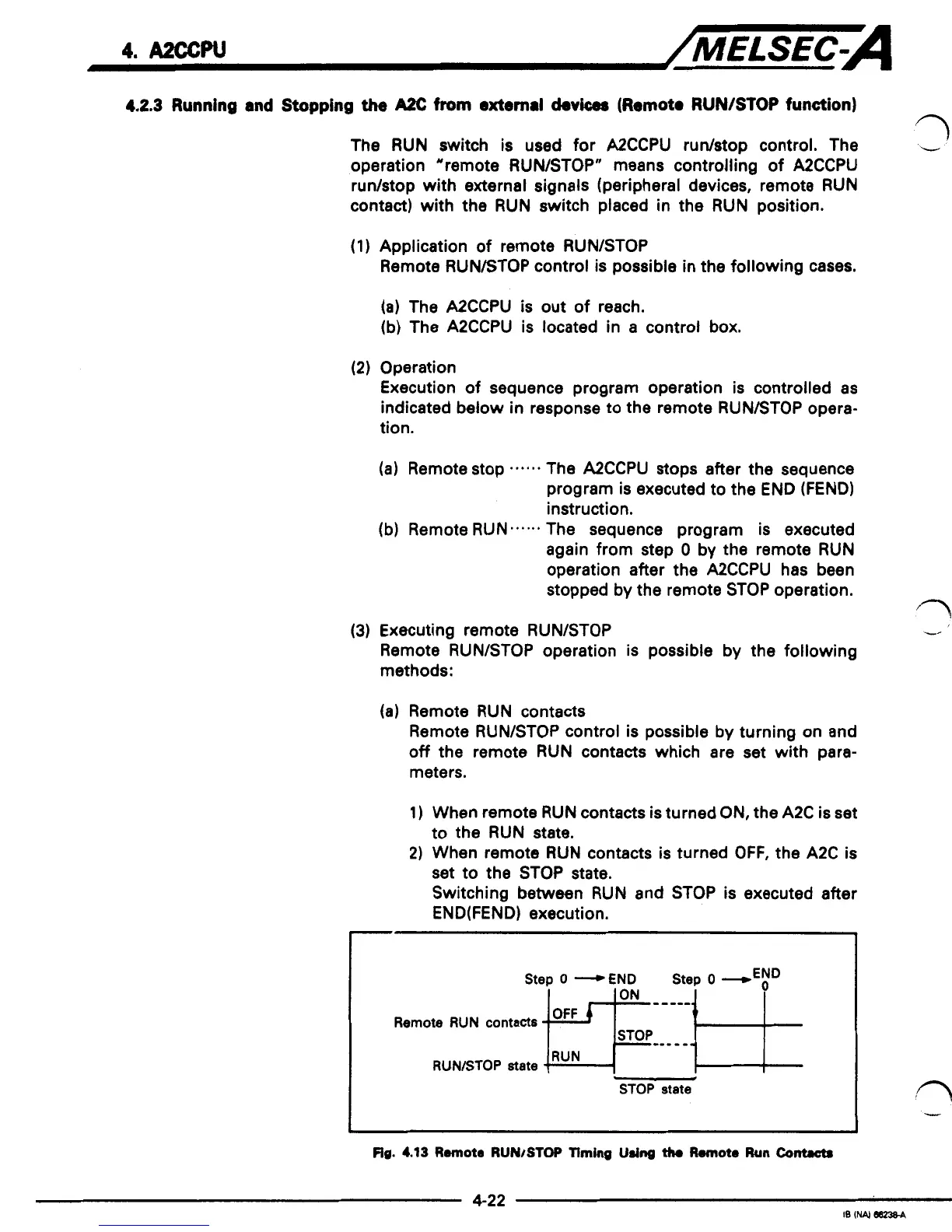
1)
When remote RUN contacts is turned ON, the A2C is set
to the RUN state.
2)
When remote RUN contacts is turned
OFF,
the A2C is
set to the STOP state.
Switching between RUN and STOP
is
executed after
END(FEND) execution.
Remote
RUN
contacts
kT-----l-+-
STOP
--
-
- -
STOP
state
Y
n
I-.
1
LJ
1
I
I
-
s
Fig.
4.13
Remote
RUNISTOP
Timing
Using
th.
Remote
Run
Cont.ctr
1
4-22
,,
18
(W
6823e-A
 Loading...
Loading...




