6
E3Z-LT/LR/LL
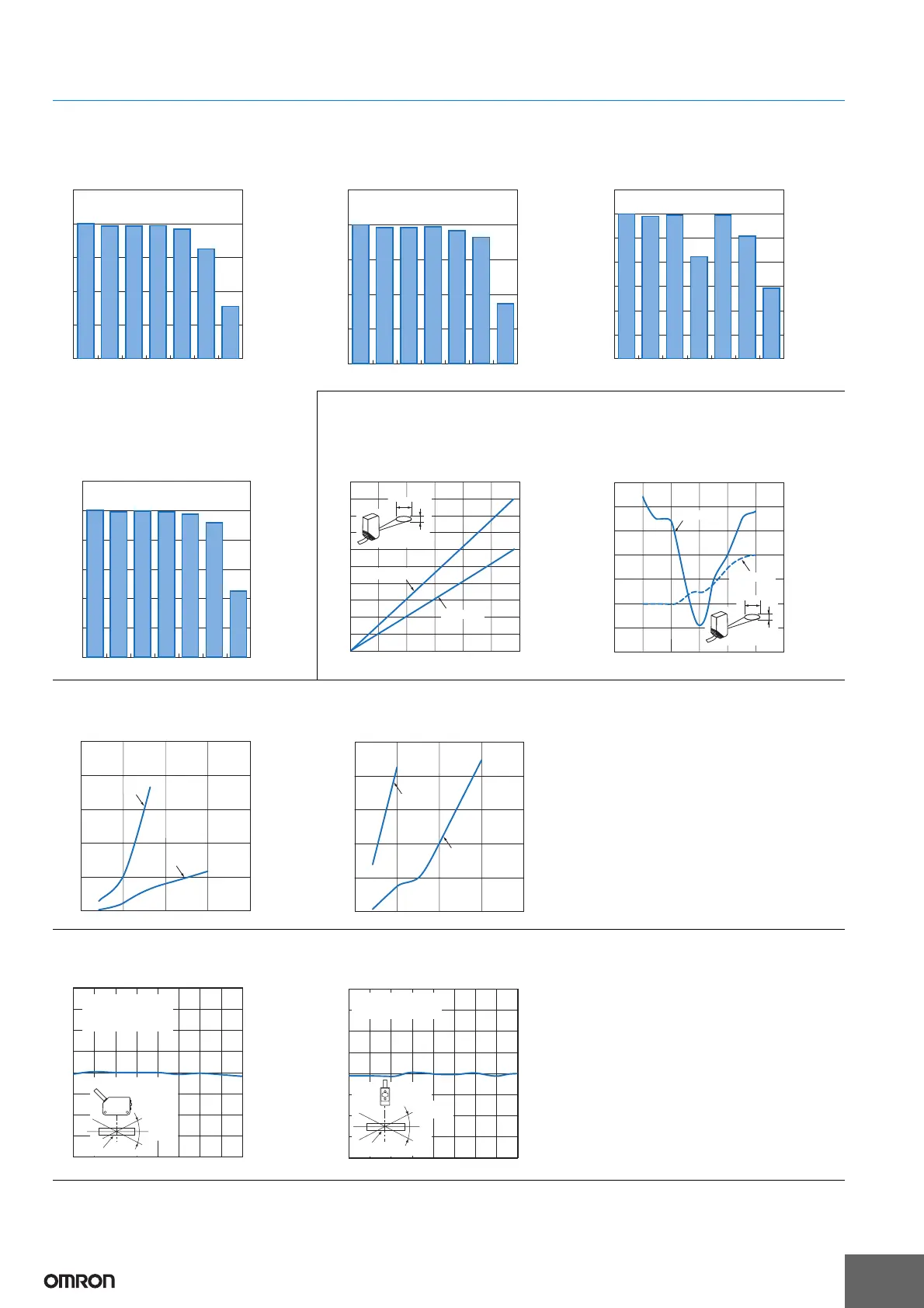
Sensing Distance vs. Sensing Object Material
BGS Models
E3Z-LL@1/-LL@6
White Paper with a Set Distance of 40 mm
E3Z-LL@3/-LL@8
White Paper with a Set Distance of 40 mm
E3Z-LL@1/-LL@6
White Paper with a Set Distance of 300 mm
Emission Spot Diameter vs. Distance
Through-beam and Retro-reflective
Models (Same for All Models)
BGS Models (Same for All Models)
E3Z-LL@3/-LL@8
White Paper with a Set Distance of 100 mm
E3Z-LT@@, E3Z-LR@@ E3Z-LL@@
Hysteresis vs. Distance
BGS Models
E3Z-LL@1 (LL@6) E3Z-LL@3 (LL@8)
Inclination Characteristics (Vertical) Inclination Characteristics (Horizontal)
BGS Models BGS Models
E3Z-LL@@ E3Z-LL@@
50
40
10
20
30
0
White
paper
Veneer Card-
board
Black
paper
Black
rubber
SUS Mirror
surface
Material
Sensing distance (mm)
50
40
10
20
30
0
White
paper
Veneer Card-
board
Black
paper
Black
rubber
SUS Mirror
surface
Material
Sensing distance (mm)
350
300
50
150
100
250
200
0
White
paper
Veneer Card-
board
Black
paper
Black
rubber
SUS Mirror
surface
Material
Sensing distance (mm)
120
100
20
60
40
80
0
White
paper
Veneer Card-
board
Black
paper
Black
rubber
SUS Mirror
surface
Material
Sensing distance (mm)
6030 40 5020100
100
50
10
20
30
40
90
60
70
80
0
Spot diameter (mm)
Dimension a
Dimension b
Set distance (m)
Spot shape
a
b
600300 400 5002001000
1.4
0.2
0.4
0.6
0.8
1.0
1.2
0
Dimension a
Dimension b
Spot diameter (mm)
Set distance (mm)
Spot shape
a
b
4003002001000
2.50
0.50
1.00
1.50
2.00
0.00
Black
paper
White
paper
Set distance (mm)
Hysteresis (%)
4003002001000
2.50
0.50
1.00
1.50
2.00
0.00
Black
paper
White
paper
Set distance (mm)
Hysteresis (%)
20
15
10
5
0
−5
−10
−15
−20
−40 −30 −20 −10 0 10203040
Sensing distance variation (%)
Distance setting: 300 mm
Sensing object: White paper
100 × 100 mm
− θ
+ θ
Inclination angle θ (°)
(Upwards
and
Downwards)
Inclination
angle
Center
line
Sensing
object
− θ
+ θ
Inclination
angle
20
15
10
5
0
−5
−10
−15
−20
−40 −30 −20 −10 0 10203040
Distance setting: 300 mm
Sensing object: White paper
100 × 100 mm
Sensing distance variation (%)
Inclination angle θ (°)
(Left and
Right)
Sensing
object
Center
line