Relevant Manuals
2
NJ-series CPU Unit Hardware User’s Manual (W500)
Relevant Manuals
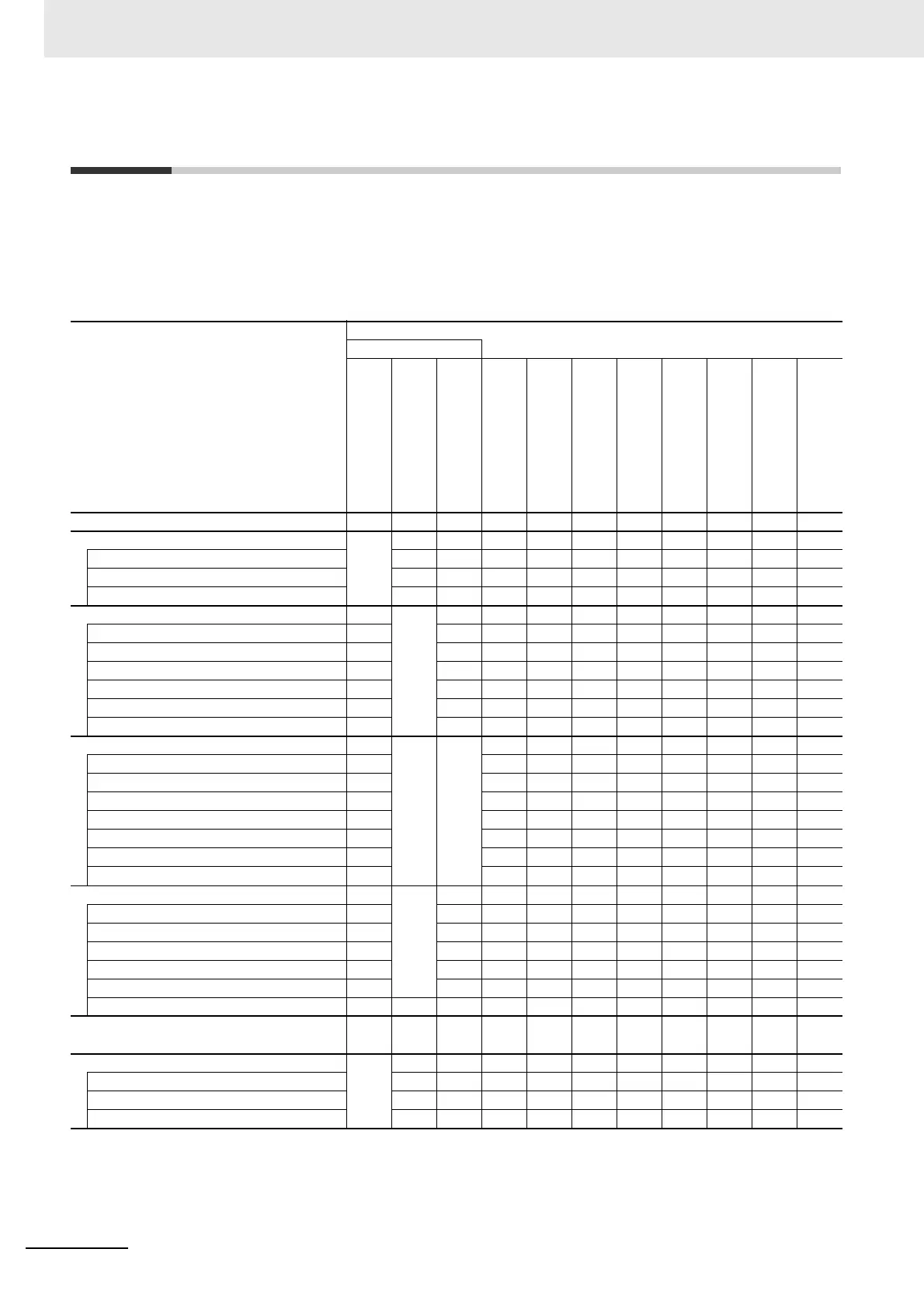
The following table provides the relevant manuals for the NJ-series CPU Units.
Read all of the manuals that are relevant to your system configuration and application before you use
the NJ-series CPU Unit.
Most operations are performed from the Sysmac Studio Automation Software. Refer to the Sysmac Stu-
dio Version 1 Operation Manual (Cat. No. W504) for information on the Sysmac Studio.
*1 Refer to the NJ/NX-series Troubleshooting Manual (Cat. No. W503) for the error management concepts and an overview
of the error items. Refer to the manuals that are indicated with triangles for details on errors for the corresponding Units.
Purpose of use
Manual
Basic information
NJ-series CPU Unit
Hardware User’s Man-
ual
NJ/NX-series CPU Unit
Software User’s Manual
NJ/NX-series Instruc-
tions Reference Manual
NJ/NX-series CPU Unit
Motion Control User’s
Manual
NJ/NX-series Motion
Control Instructions
Reference Manual
NJ/NX-series CPU Unit
Built-in EtherCAT Port
User’s Manual
NJ/NX-series CPU Unit
Built-in EtherNet/IP Port
User’s Manual
NJ-series Database
Connection CPU Units
User’s Manual
NJ-series SECS/GEM
CPU Units User’s Man-
ual
NJ-series NJ Robotics
CPU Unit User’s Manual
NJ/NX-series Trouble-
shooting Manual
Introduction to NJ-series Controllers
Setting devices and hardware
Using motion control
Using EtherCAT
Using EtherNet/IP
Software settings
Using motion control
Using EtherCAT
Using EtherNet/IP
Using the database connection service
Using the GEM Services
Using robot control
Writing the user program
Using motion control
Using EtherCAT
Using EtherNet/IP
Using the database connection service
Using the GEM Services
Using robot control
Programming error processing
Testing operation and debugging
Using motion control
Using EtherCAT
Using EtherNet/IP
Using the database connection service
Using the GEM Services
Using robot control
Learning about error management and
corrections
*1
Maintenance
Using motion control
Using EtherCAT
Using EtherNet/IP
 Loading...
Loading...







