1 - 5
1 Features and System Configuration
NX-series Position Interface Units User’s Manual (W524)
1-1 Features of Position Inter-
face Units
1
1-1-2 Types and Features of Position Interface Units
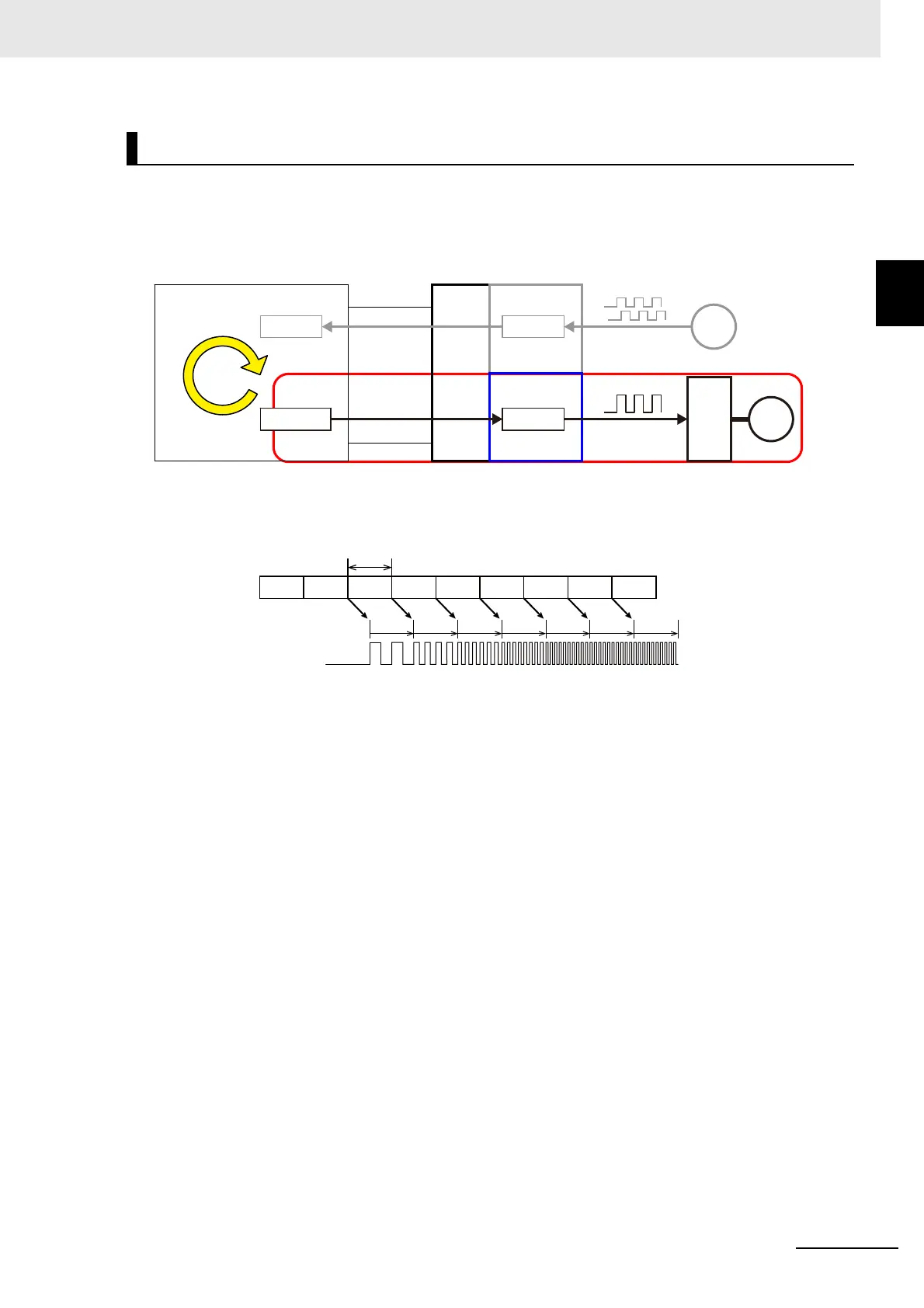
A Pulse Output Unit performs pulse output for positioning commands sent to a stepper motor drive or
other pulse input motor drive.
Use a Pulse Output Unit to enable the Controller to perform positioning.
You can also latch the pulse output value with an external input.
*1. Pulse output is performed based on the synchronization commands (target positions) received from the Con-
troller each control period.
The frequency is calculated based on the travel distance for the control period and the pulses are output.
The Pulse Output Unit is a simple output unit that performs pulse output based on periodically received
target positions, as shown in the above figure.
Profile processing of the position (number of pulses) and velocity (pulse frequency) for motor control
must be performed by the Controller that provides the target position information.
Therefore, the Unit synchronizes with the Controller at a fixed period.
NJ/NX-series Controllers are connected through an EtherCAT Coupler Unit and use EtherCAT in DC
Mode.
Features
• Pulses are output according to the position command information that is provided periodically.
• Control can interface with pulse input drives, such as stepper motor drives, through the pulse out-
put.
• You can latch position information with an external input.
Pulse Output Units
Example:
EtherCAT
EtherCAT
Coupler
Unit
*1
Counter
Encoder Input
Pulse output
Pulse generation
Pulses
Motor and drive
Encoder
Pulses
Target position
Controller
Count value
Control
(synchronization)
period
+2 +4 +6 +8 +10 +10 +10
0 0 2 6 1220304050
Control period
Controller
Target position
Unit
Pulse output
 Loading...
Loading...






