A - 71
Appendices
NX-series Position Interface Units User’s Manual (W524)
A-6 Applicable Motion Control Instructions
A
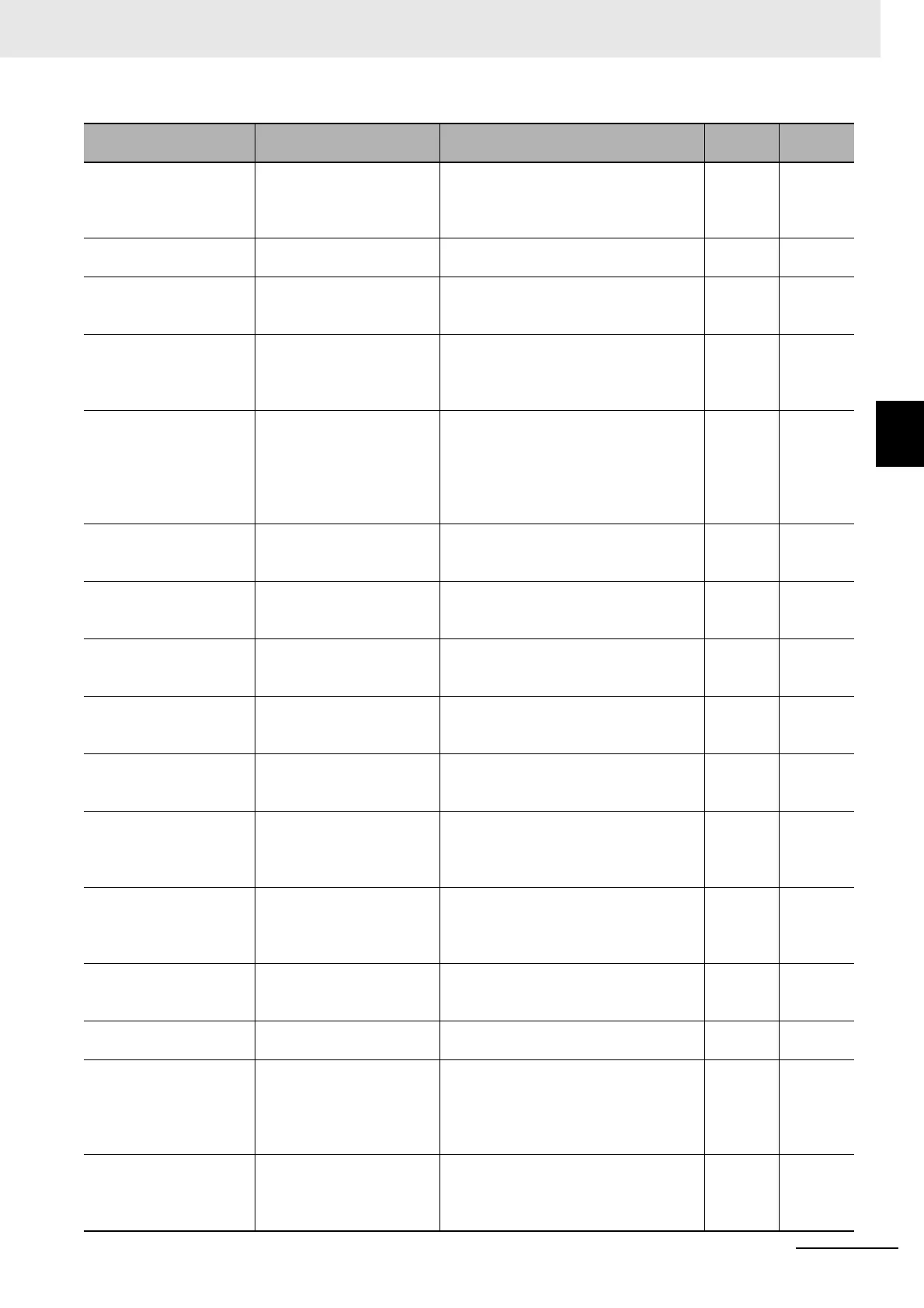
A-6-3 Instructions for Axis Commands
Reset Following Error MC_ResetFollowingError The MC_ResetFollowingError instruction
resets the following error between the
command position and the actual posi-
tion.
A
Yes
*3
Start Cam Operation MC_CamIn The MC_CamIn instruction starts a cam
operation by using a specified cam table.
AYes
End Cam Operation MC_CamOut The MC_CamOut instruction ends the
cam operation for the axis specified with
the input parameter.
AYes
Start Gear Operation MC_GearIn The MC_GearInPos instruction sets the
gear ratio between the master axis and
the slave axis and performs electronic
gear operation.
AYes
Positioning Gear Opera-
tion
MC_GearInPos The MC_GearInPos instruction per-
forms electronic gear operation for the
specified gear ratio between the master
axis and the slave axis. The positions at
which to start synchronizing the master
axis and slave axis are specified.
AYes
End Gear Operation MC_GearOut The MC_GearOut instruction stops exe-
cution of the MC_GearIn and
MC_GearInPos instructions.
AYes
Synchronous Positioning MC_MoveLink The MC_MoveLink instruction performs
positioning in sync with the specified
master axis.
AYes
Combine Axes MC_CombineAxes The MC_CombineAxes instruction out-
puts the sum or difference of the com-
mand positions of two axes.
AYes
Shift Master Axis MC_Phasing The MC_Phasing instruction shifts the
phase of the master axis currently in
synchronized control.
AYes
Torque Control MC_TorqueControl The MC_TorqueControl instruction uses
the Torque Control Mode of the Servo
Drive to control the torque.
---
No
*4
Set Torque Limit MC_SetTorqueLimit The MC_SetTorqueLimit instruction lim-
its the torque output from the Servo
Drive through the torque limit function of
the Servo Drive.
---
No
*4
Zone Monitor MC_ZoneSwitch The MC_ZoneSwitch instruction deter-
mines if the command position or actual
current position of an axis is within a
specified zone.
--- Yes
Enable External Latch MC_TouchProbe The MC_TouchProbe instruction records
the position of an axis when a trigger sig-
nal occurs.
AYes
Disable External Latch MC_AbortTrigger The MC_AbortTrigger instruction aborts
a current latch operation.
AYes
Monitor Axis Following
Error
MC_AxesObserve The MC_AxesObserve instruction moni-
tors the deviation of the command posi-
tion or actual position for the specified
axis to see if it exceeds the allowed
value.
AYes
Cyclic Synchronous
Velocity Control
MC_SyncMoveVelocity The MC_SyncMoveVelocity instruction
outputs the value set for the target veloc-
ity every task period to the Servo Drive in
Cyclic Synchronous Velocity Mode.
---
No
*4
Instruction name Instruction Outline of instruction
Attri-
butes
Applica-
bility
 Loading...
Loading...






