*1. These steps are required if a Pulse Output Unit is used to control the motor drive.
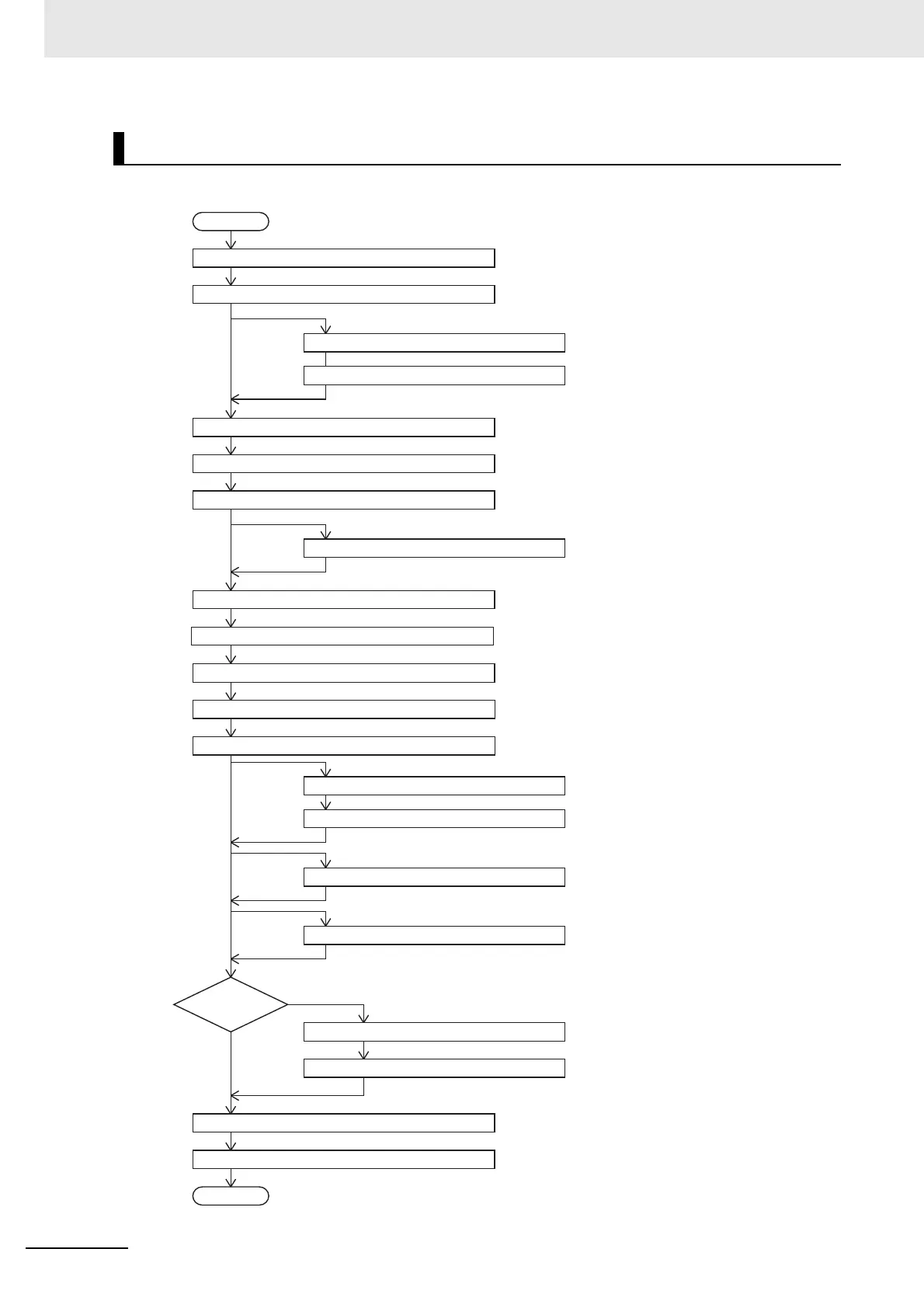
START
Create a project.
Setup
Create the EtherCAT network configuration.
Add axes.
Assign the axes.
Set the axis parameters.
Set the Controller Setup.
Transferring
Transfer the project to the Controller.
Checking Wiring
Open the MC Test Run Tab Page or the Axis Status Monitor (MC Monitor Table).
Monitor input signals to check the wiring.
Perform jogging.
*1
Checking Operation
END
Error?
Debugging
Yes
Read the error code.
Remove the cause of the error and reset the error.
Operate the Controller and the machine.Operation
Perform periodic maintenance.Maintenance
Define the homes of the Servomotor axes to control.
*1
Homing
No
Programming
Manual Operation
Jog the axes with the user program.
*1
Write a program to perform jogging.
*1
Program the motion controls.
Programming
Create the NX Unit configuration.
Set the NX Unit parameters.
Set up the functions in the MC Function Module.
EtherCAT Slave Terminal Configu-
ration and Settings on page 2-5
Parameter Settings of the Position
Interface Units on page 2-5
 Loading...
Loading...






