12.2 b: APPLICATION
520 SIEPYEUOQ2A01A AC Drive Q2A Technical Manual
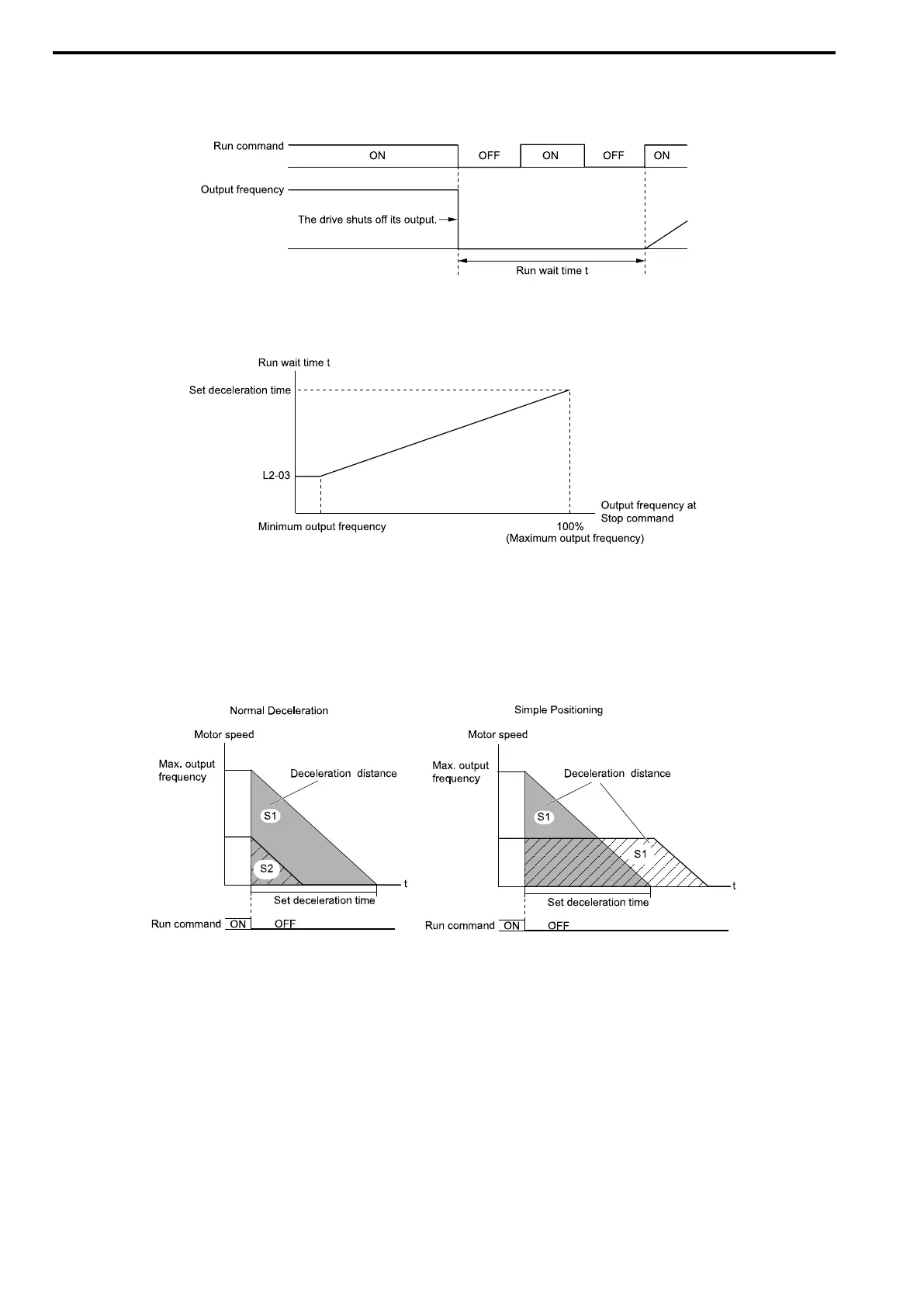
Enter the Stop command or turn OFF the Run command and turn OFF drive output and coast the motor to stop.
The drive ignores the Run command until the “Run wait time” t is expired.
To start the drive again, enter the Run command after the “Run wait time” t is expired.
Figure 12.9 Coast to Stop with Timer
The active deceleration time and the output frequency when drive receives the Stop command determine the
length of “Run wait time” t.
Figure 12.10 Run Wait Time and Output Frequency
9 : Distance Stop
Enter the Stop command or turn OFF the Run command for the drive to always decelerate for the same distance.
The drive uses the active deceleration time and the value set in E1-04 [Max Output Frequency] to calculate
stopping distance S1. The drive holds its current speed when stopping from a frequency less than the maximum
speed. When the distance covered is equal to S1 minus S2, the drive ramps to stop in the current deceleration
time. Adjust the stopping precision with d4-12 [Stop Position Gain].
Figure 12.11 Deceleration When Set for Stop in Position
Note:
Note these points when setting Stop in Position.
• The drive uses the deceleration time that was active when the drive received the Stop command or when the Run command was turned
OFF to calculate the stop time. If you change the deceleration time during deceleration, the positioning will not be accurate.
• Set b6-03 = 0.0 [Dwell Ref@Stop = 0.0], b6-04 = 0.0 [Dwell Time@Stop = 0.0 s].
• The KEB Ride-Thru function is not available. Set H1-xx: MFDI Function Select ≠ 40, 41, 42, 43 [KEB Thru1 NC, KEB Thru1 NO,
KEB Thru2 NC, KEB Thru2 NO].
• Set L3-04 = 0 [StallP@Decel Enable = Disabled]. A dynamic braking option can be necessary for regenerative loads.
• Set L3-11 = 0 [Overvolt Supression Select = Disabled].
• The High Slip Braking function is not available. Set H1-xx: MFDI Function Select ≠ 32 [HiSlipBraking].
• Set C2-03, C2-04 = 0.00 [Jerk@Start of Decel, Jerk@End of Decel = 0.00 s].
 Loading...
Loading...




