Terminology
44
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
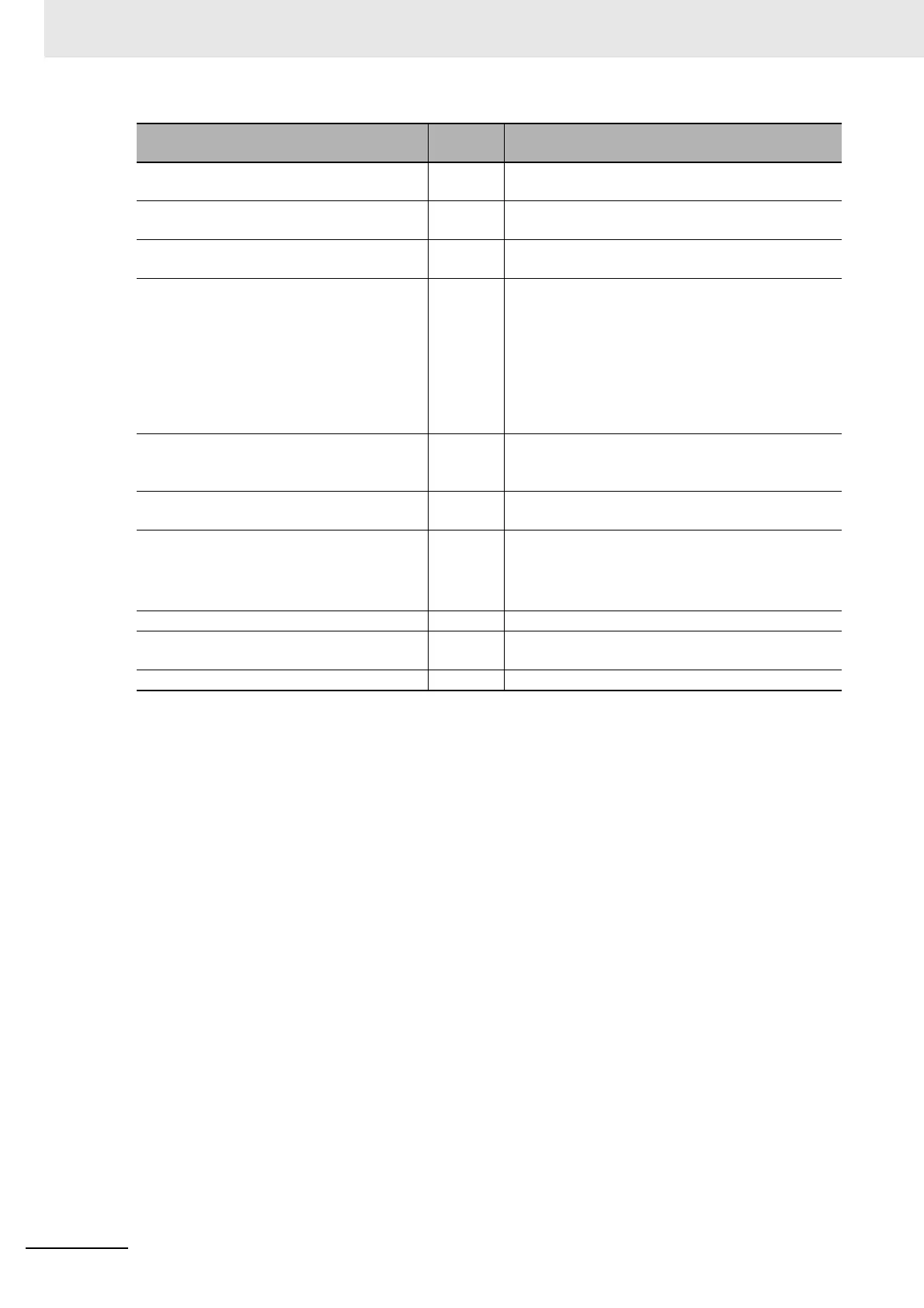
safety control --- A type of control that uses devices, functions, and
data that are designed with special safety measures.
Safety over EtherCAT FSoE A system to communicate for the functional safety
over EtherCAT.
safety process data communications --- A type of I/O data communications that is used for
safety control purposes.
safety reaction time --- The time required for the system to enter a safe state
in a worst-case scenario after the occurrence of a
safety-related input (press of an emergency stop
pushbutton switch, interruption of a light curtain,
opening of a safety door, etc.) or device failure.
The reaction time of the system includes the reaction
times of sensors and actuators, just like the reaction
time for a Controller or network.
Service Data Object SDO CoE asynchronous mailbox communications where
all objects in the object dictionary can be read and
written.
Slave Information Interface SII Slave information stored in the nonvolatile memory
of each slave.
standard control --- A type of control that use devices, functions, and
data that are designed for general control purposes.
This term is used to differentiate from a safety con-
trol.
Subindex --- Sub-address of an object within the object dictionary.
Sync Manager SM Collection of control elements to coordinate access
to concurrently used objects.
Transmit PDO TxPDO A process data object sent from an EtherCAT slave.
Term
Abbrevi-
ation
Description
 Loading...
Loading...

