11 Adjustment Functions
11 - 26
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
11-11 Friction Torque Compensation
Function
You can set the following three types of friction torque compensations to reduce the influence of
mechanical frictions.
• Unbalanced load compensation: Offsets the constantly applied unbalance torque
• Dynamic friction compensation: Compensates friction that changes its direction in accordance with
the operating direction.
• Viscous friction compensation: Compensates friction that varies in accordance with velocity.
The friction torque compensation function is enabled under the following conditions.
• Position control or velocity control
• The Servo is ON.
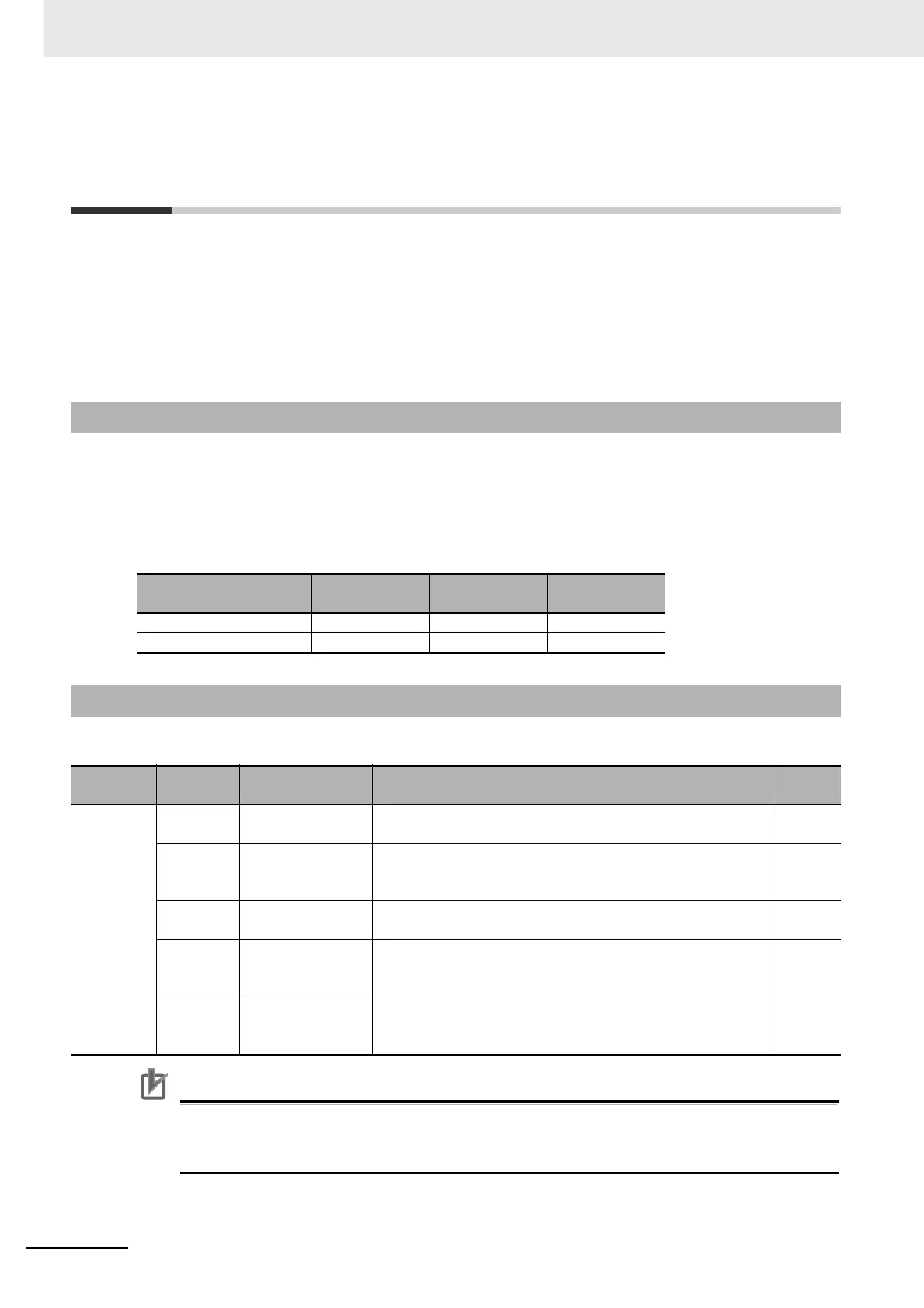
The following table shows the relationship between the control method and enabled compensation
functions.
The friction torque compensation function needs the combined settings of the following four objects.
Precautions for Correct Use
If the update selection of the Load Characteristic Estimation is set to 1, the friction torque
compensation is set automatically. If you want to set the torque compensation manually, set the
update selection of Load Characteristic Estimation to 0.
11-11-1 Operating Conditions
Control method
Viscous friction
compensation
Unbalanced load
compensation
Dynamic friction
compensation
TDF control Enabled Enabled Enabled
ODF control Disabled Enabled Enabled
11-11-2 Objects Requiring Settings
Index (hex)
Subindex
(hex)
Name Description
Refer-
ence
3310
---
Torque Compensa-
tion
Sets the torque compensation. P. 9-43
01 Viscous Friction
Coefficient
Adjusts the amount of viscous friction compensation torque.
This object is enabled only in two-degree-of-freedom (TDF)
control.
P. 9-43
02 Unbalanced Load
Compensation
Sets the amount of unbalanced load torque compensation. P. 9-43
03 Positive Dynamic
Friction Compen-
sation
Sets the amount of dynamic friction compensation in the posi-
tive direction.
P. 9-43
04 Negative Dynamic
Friction Compen-
sation
Sets the amount of dynamic friction compensation in the nega-
tive direction.
P. 9-44
 Loading...
Loading...

