A - 47
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-2 CoE Objects
A
A-2-8 Servo Drive Profile Object
Description of Set Values
Precautions for Correct Use
When the error is cleared, a process which makes the command position follow the present
position comes into effect. To operate in Cyclic synchronous position mode (csp) after the
Servo turns ON, reset the command coordinates in the host controller and then execute the
operation. The Servomotor may move suddenly.
• This object sets the mode of operation.
• The default value is 0 (not specified). Set the mode of operation from the master after the power sup-
ply is turned ON.
• A Command Warning (Error No. B1.00) occurs if the Servo is turned ON (Operation enabled = 1) with
the default setting of 0 (not specified).
• Even when the default value 0 (not specified) is set again after changing the mode of operation, the
mode of operation does not return to a not specified. The last mode of operation is retained.
• Similarly, when an unsupported mode of operation is set, the last mode is retained.
• When an unsupported mode of operation is set via SDO communications, an ABORT code is
returned.
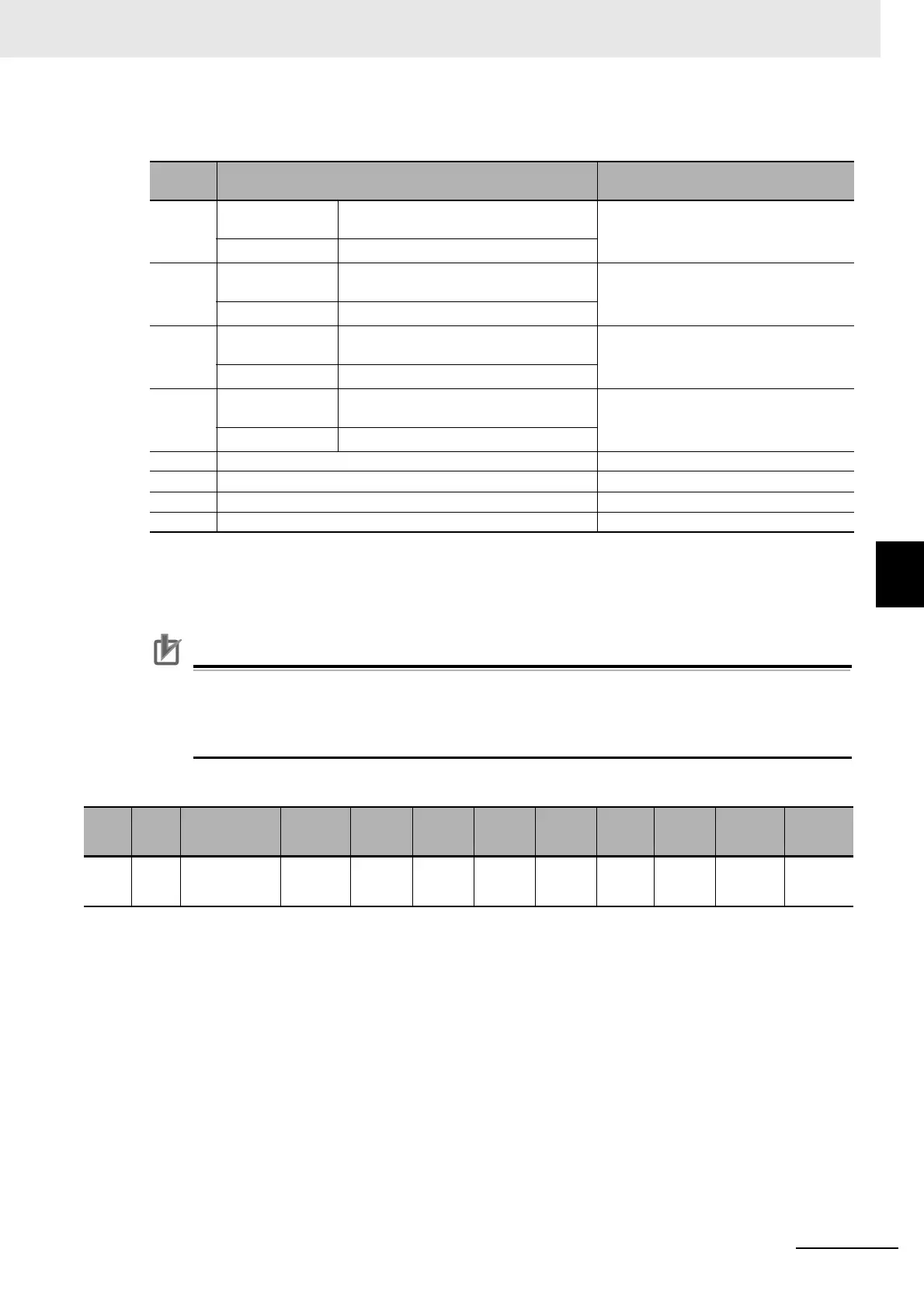
Set
value
Deceleration operation Operation after stopping
-7
Operation A
*1
*1. Operation A and B indicate whether or not to perform the deceleration stop when an error occurs. If an error
that causes the deceleration stop occurs, the deceleration stop is performed according to the setting of Oper-
ation A. If an error that does not cause the deceleration stop occurs, the dynamic brake operation or free-run
is performed according to the setting of Operation B. For details on errors, refer to 12-3 Errors on page 12-10.
Deceleration stop (The deceleration
stop torque is used.)
Free
Operation B
*1
Free-run
-6
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Free
Operation B
*1
Dynamic brake operation
-5
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Dynamic brake operation
Operation B
*1
Free-run
-4
Operation A
*1
Deceleration stop (The deceleration
stop torque is used.)
Dynamic brake operation
Operation B
*1
Dynamic brake operation
-3 Dynamic brake operation Free
-2 Free-run Dynamic brake operation
-1 Dynamic brake operation Dynamic brake operation
0 Free-run Free
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6060 --- Modes of oper-
ation
0 to 10 --- 0 A 1 byte
(INT8)
W RxPDO Not possi-
ble
csp, csv,
cst, pp,
pv, hm
 Loading...
Loading...

