6 Basic Control Functions
6 - 20
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
The bits in Statusword used in the Profile position mode are explained below.
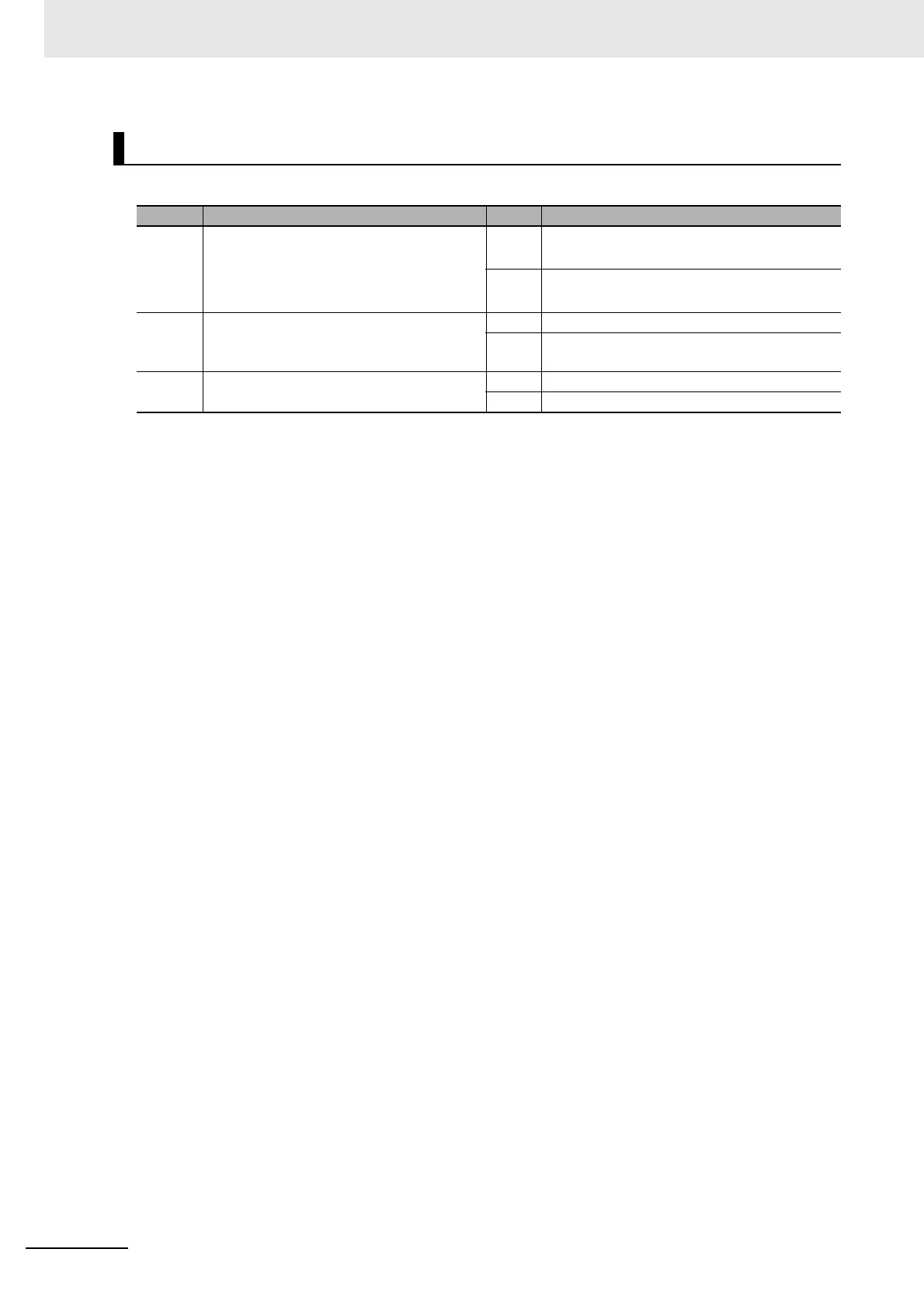
Statusword (6041 hex) in Profile Position Mode
Bit Name Value Description
10 Target reached 0 Halt bit is 0: Positioning is not completed.
Halt bit is 1: The axis is decelerating.
1 Halt bit is 0: Positioning is completed.
Halt bit is 1: The axis speed is zero.
12 Set-point acknowledge 0 Waiting for a new Target position.
1 Ready to accept updates (overwriting) of the
Target position.
13 Following error 0 No Following error occurred.
1 A Following error occurred.