6 Basic Control Functions
6 - 22
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
When you set the Target velocity (60FF hex), the Servo Drive starts acceleration/deceleration opera-
tion to the set target velocity.
You can change the target velocity while acceleration/deceleration is in progress.
Related Objects
Index
(hex)
Subindex
(hex)
Name Access Size Unit Setting range
Default
setting
6040 00 Controlword W U16 --- 0000 to FFFF
hex
0000 hex
6041 00 Statusword R U16 --- --- ---
6064 00 Position actual value R INT32 Command unit --- ---
606B 00 Velocity demand
value
R INT32 Command
unit/s
--- ---
606C 00 Velocity actual value R INT32 Command
unit/s
--- ---
6077 00 Torque actual value R INT16 0.1% --- ---
607F 00 Max profile velocity W U32 Command
unit/s
0 to
2,147,483,647
0
6083 00 Profile acceleration W U32 Command
unit/s
2
1 to
2,147,483,647
1,000,000
6084 00 Profile deceleration W U32 Command
unit/s
2
1 to
2,147,483,647
1,000,000
60FF 00 Target velocity W INT32 Command
unit/s
-2,147,483,648
to
2,147,483,647
0
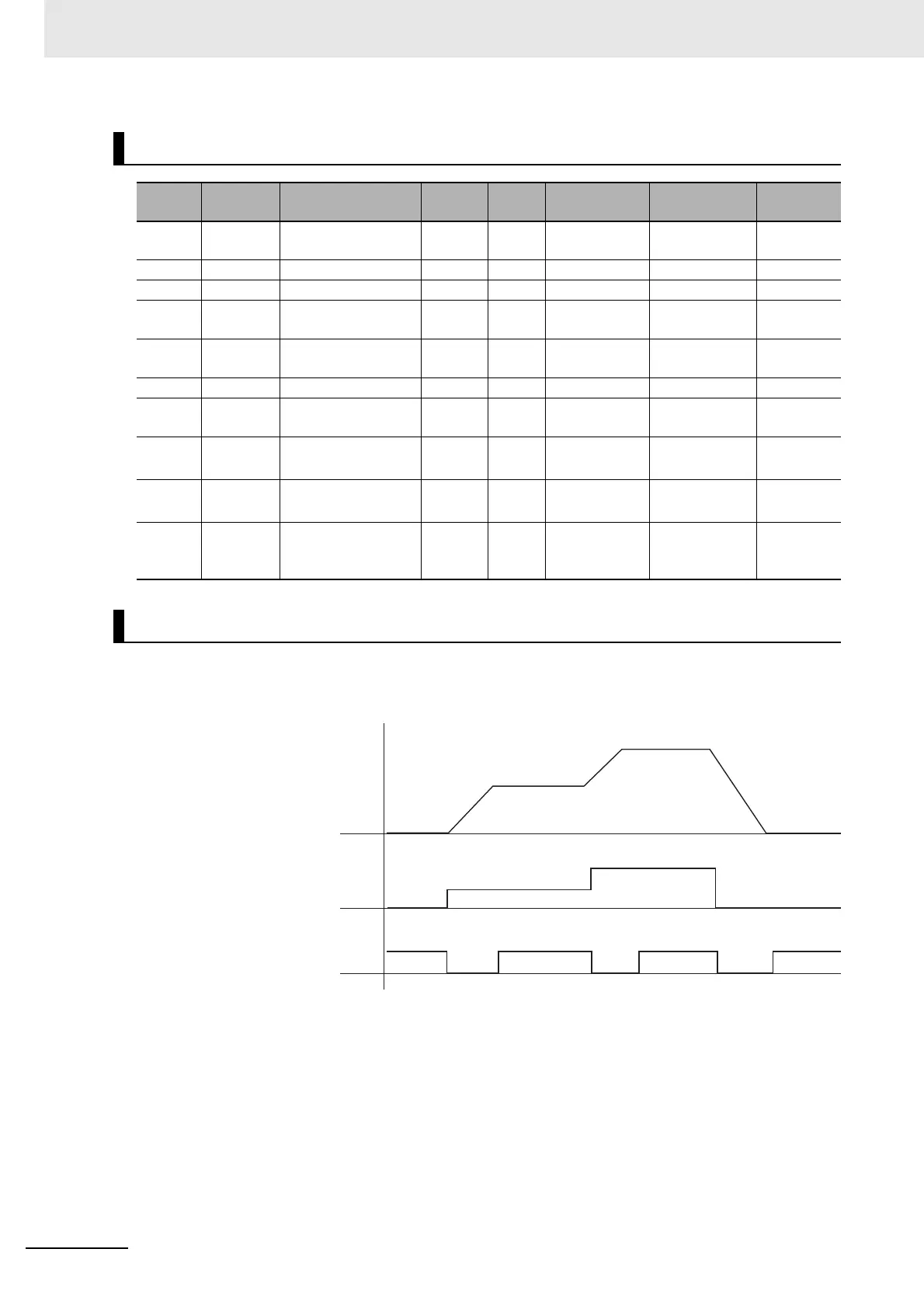
Description of Function
60FF hex: Target velocity
Velocity
6041 hex bit 10: Target velocity reached