7 Applied Functions
7 - 36
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
3232
---
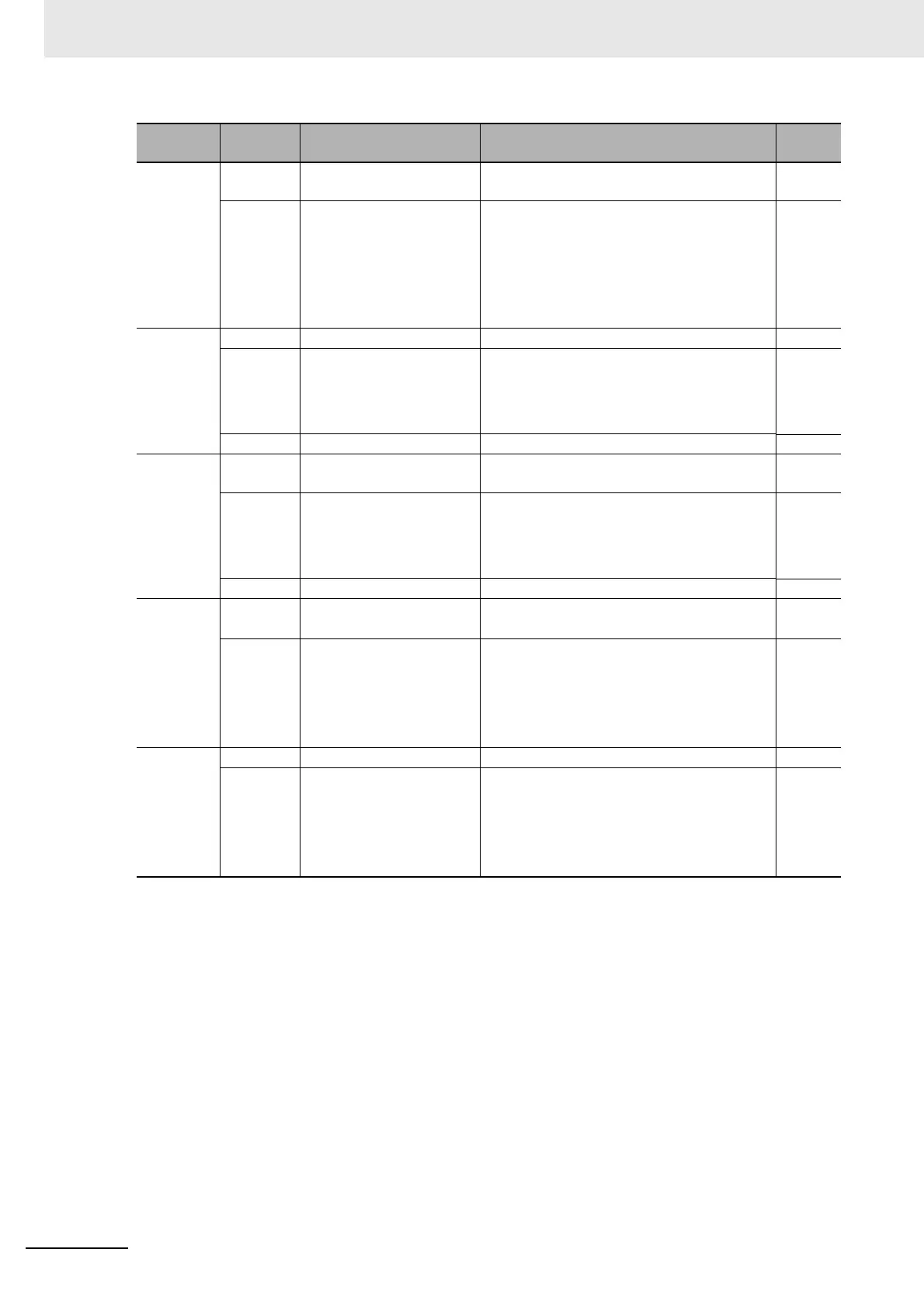
Filter Switching in Torque
Control
Sets the filter switching method in the torque
control.
P. 9-40
01 Mode Selection Selects the condition to switch between 1st
Filter and 2nd Filter.
0: Always 1st Filter
1: Always 2nd Filter
2: Gain switching command input via Ether-
CAT communications
P. 9-41
3233
---
1st Torque Command Filter Sets the 1st torque command filter. P. 9-41
01 Enable Selects whether to enable or disable the 1st
torque command filter.
0: Disabled
1: Enabled
P. 9-41
02 Cutoff Frequency Sets the cutoff frequency for the filter. P. 9-41
3234
---
2nd Torque Command Fil-
ter
Sets the 2nd torque command filter. P. 9-42
01 Enable Selects whether to enable or disable the 2nd
torque command filter.
0: Disabled
1: Enabled
P. 9-42
02 Cutoff Frequency Sets the cutoff frequency for the filter. P. 9-42
4602
---
Function Output Sets the function output. P. 9-110
01 Bit Mask Selects whether to enable or disable the func-
tion outputs.
bit 24: Gain Switching (G-SEL)
0: Gain switching disabled
1: Gain switching enabled
P. 9- 110
60FE
---
Digital outputs
–
P. A -6 1
01 Physical outputs Changes the function output status of each
bit.
bit 24: Gain Switching (G-SEL)
0: Gain 1
1: Gain 2
P. A -6 1
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
 Loading...
Loading...

