12 - 37
12 Troubleshooting
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
12-5 Troubleshooting
12
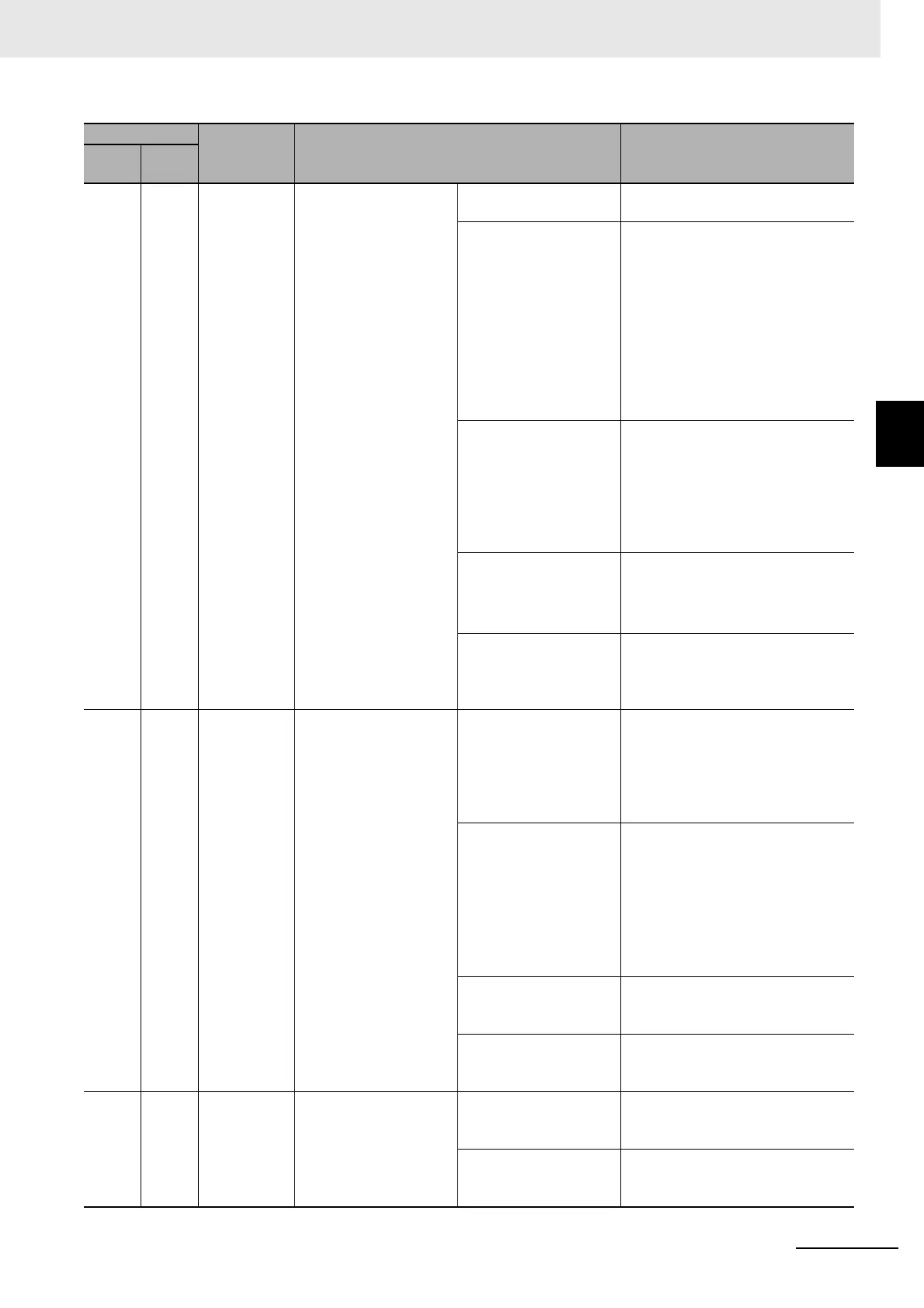
12-5-1 Troubleshooting Using Error Displays
B1 00 Command
Warning
A command could not
be executed.
The Switch on com-
mand was received.
Send the Switch on command with
the main circuit power supply ON.
The Enable operation
command was received.
Send the Enable operation com-
mand under the following condi-
tions.
• In supported operation mode
• The motor rotation speed is 30
r/min or less.
• In the free-run mode, the interpo-
lation time period is the integral
multiple of the communications
cycle.
An operation command
in the prohibition direc-
tion was received after
the immediate stop by
the Drive Prohibition
Input or Software Posi-
tion Limit.
Check status of the Drive Prohibi-
tion Input and Software Position
Limit by the Digital inputs, Sta-
tusword, and Software Position
Limit. Then, do not issue the com-
mand in the drive prohibition direc-
tion.
Homing started. Set a supported number of the
Homing method for homing.
Start homing at the timing of when
homing is not performed.
The positioning start
command was received
in the Profile position
mode.
Set a supported value for bit 5 and
6 in the Controlword.
B2 00 EtherCAT
Communica-
tions Warning
An EtherCAT communi-
cations error occurred
more than one time.
An EtherCAT communi-
cations cable is discon-
nected, broken,
short-circuited, or has a
contact failure in a daisy
chain configuration.
Connect the EtherCAT communica-
tions cable securely. If the cable is
broken, replace it.
• In a ring topology con-
figuration, the ring dis-
connection status
occurred.
• In a ring topology con-
figuration, the ring dis-
connection status was
fixed.
Refer to 13-4 Method for Broken
Ring Maintenance and Inspection
on page 13-5 and perform inspec-
tion.
Noise Take noise countermeasures so
that the noise does not affect the
EtherCAT communications cable.
Failure of the EtherCAT
physical layer of a
Servo Drive
If this event occurs again after you
performed all corrections shown
above, replace the Servo Drive.
C0
(ST)
00 STO
Detected
The safety input OFF
state was detected via
the safety input signal or
EtherCAT communica-
tions.
The cable is discon-
nected or broken.
Reconnect the input wiring for
safety inputs 1 and 2. If the cable is
broken, replace it.
The STO input was
turned OFF via Ether-
CAT communications.
Remove the cause that turned OFF
the safety input signal of the Safety
Input Unit.
Error No.
Name Cause Measures
Main
(hex)
Sub
(hex)