Appendices
A - 6
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
• If the operation mode is changed to Homing mode during the motor operation, the motor performs
the stop operation according to the setting of Halt option code (605D hex).
• If a motion command of Homing mode or Profile position mode is input during a deceleration stop
operation, the motor starts the Homing operation or Profile position operation.
If you change the operation mode to another mode while the motor is performing the homing operation,
a command error will occur.
You can check the actual operation mode from the Modes of operation display (6061 hex).
Some of the bits in the Statusword (6041 hex) are dependent on the operation mode. Their relation-
ship with Modes of operation display (6061 hex) is shown in the following table:
Setting Operation Warning
0 (nma)
The current operation
mode is retained.
None
1 (pp), 3 (pv), 6 (hm), 8 (csp), 9 (csv), or 10 (cst)
Changed to the specified
mode.
None
2, 4, 5, or 7
The current operation
mode is retained.
Command Warning
Others
The current operation
mode is retained.
Data Setting Warning
Changing to Homing Mode or Profile Position Mode When the Motor
Is Running
Precautions in Homing Mode
Modes of Operation Display
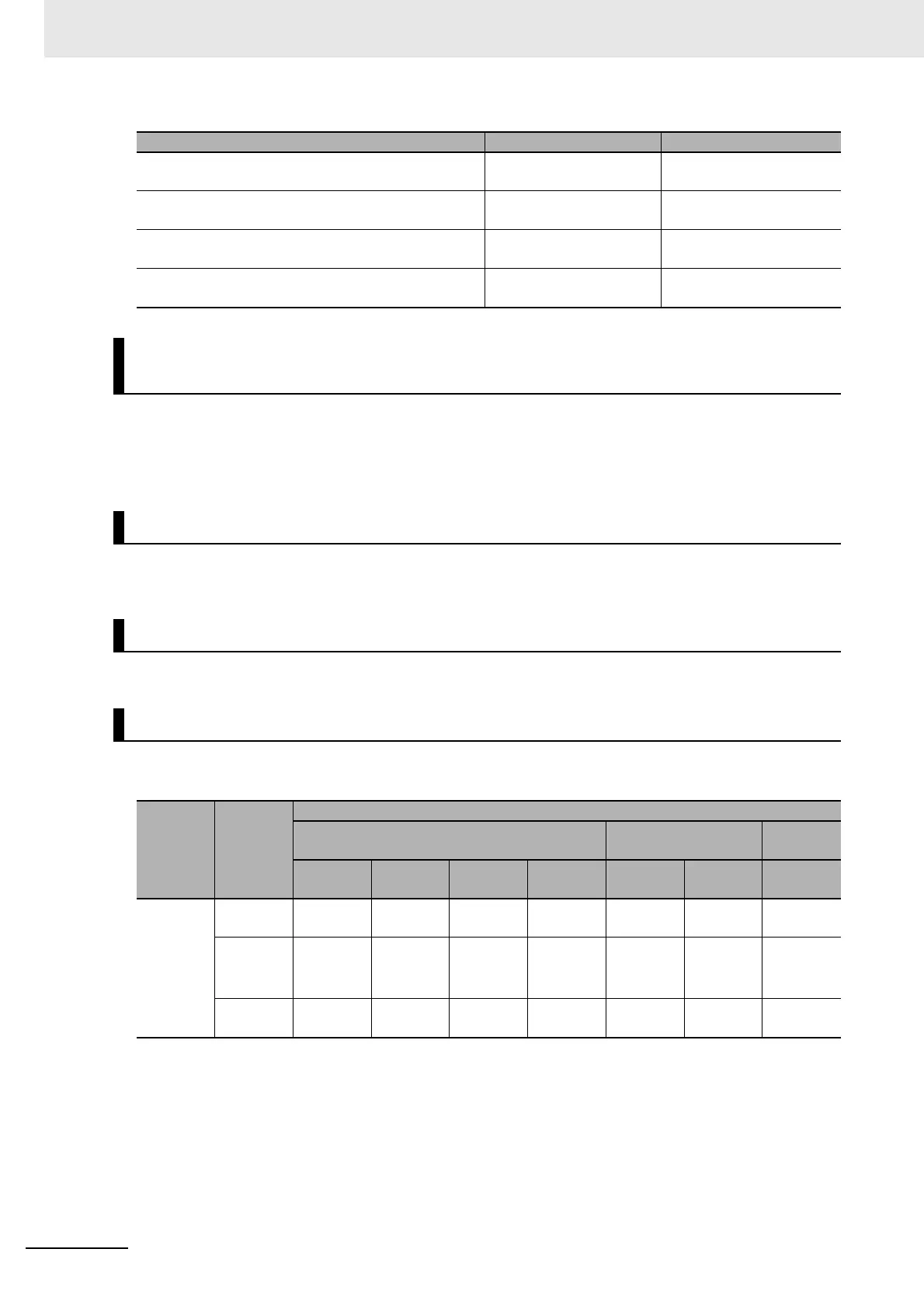
Bit Displays According to Modes of Operation Display (6061 hex)
Object
(hex)
Bit
Modes of operation display (6061 hex)
Position control Velocity control
Torque
control
csp pp hm
Not
specified
csv pv cst
6041 10 Status
toggle
Target
reached
Target
reached
0 Status
toggle
Target
reached
Status
toggle
12 Target
position
ignored
*1
*1. If commands in Controlword (6040 hex) are not followed when the Servo is ON, this bit will be 0 (ignored).
For details, see the following Example of Servo OFF during Operation in csp, csv, or cst.
Acknowl-
edge
Home
attained
0 Target
velocity
ignored
*1
Speed Target
torque
ignored
*1
13 Following
error
Following
error
Homing
error
0000