Appendices
A - 48
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
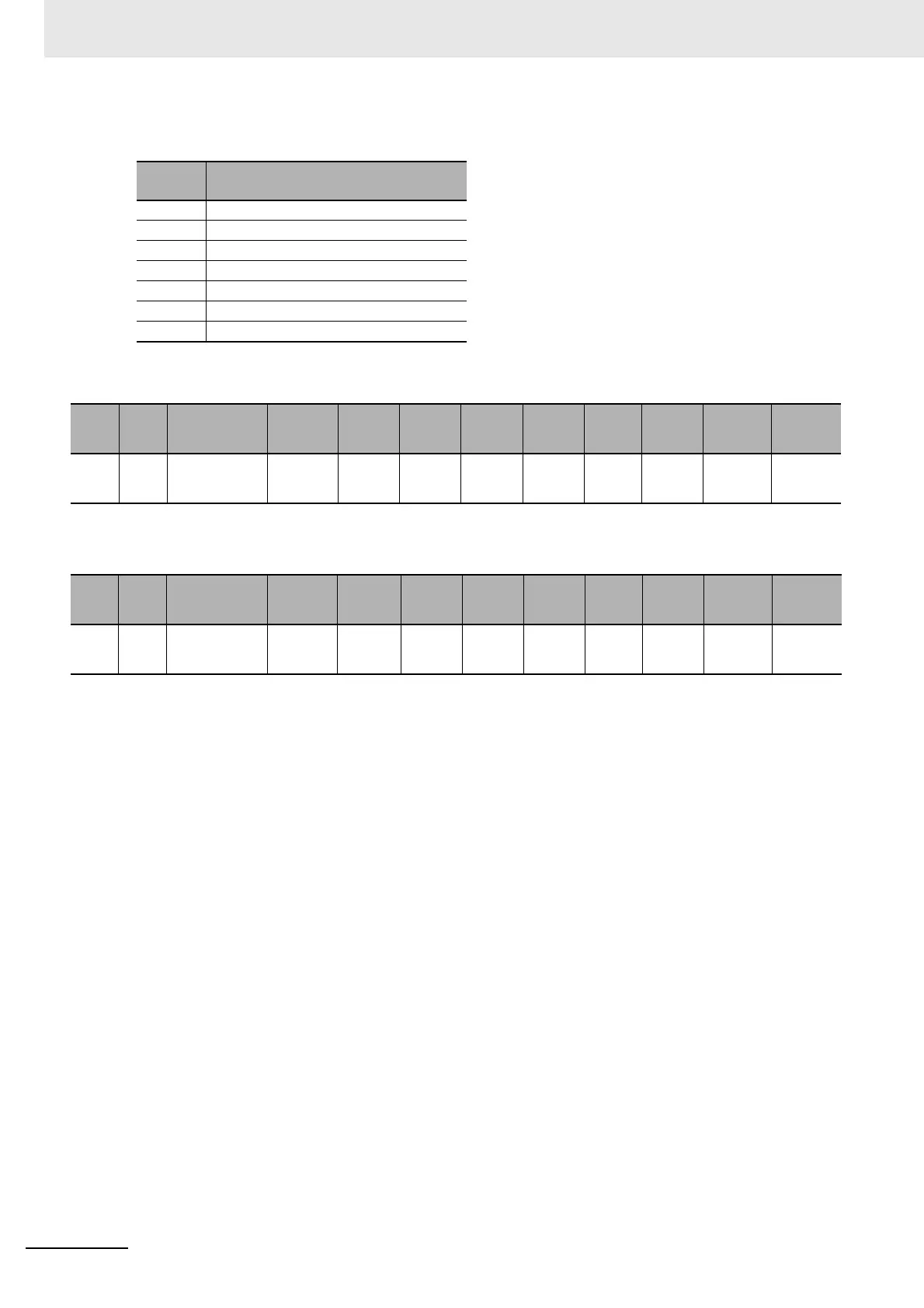
Description of Set Values
• For details about changing the modes of operation, refer to A-1-4 Changing the Mode of Operation
on page A-5.
• This object gives the present mode of operation.
• The value definitions are the same as those for Modes of operation (6060 hex).
• This object gives the command position which is generated in the Servo Drive.
Set
value
Description
0 Not specified
1 Profile position mode (pp)
3 Profile velocity mode (pv)
6 Homing mode (hm)
8 Cyclic synchronous position mode (csp)
9 Cyclic synchronous velocity mode (csv)
10 Cyclic synchronous torque mode (cst)
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6061 --- Modes of oper-
ation display
--- --- --- --- 1 byte
(INT8)
RO TxPDO Not possi-
ble
csp, csv,
cst, pp,
pv, hm
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
6062 --- Position
demand value
--- Com-
mand
unit
--- --- 4 bytes
(INT32)
RO TxPDO Not possi-
ble
csp, pp,
hm

 Loading...
Loading...
