11 - 31
11 Adjustment Functions
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
11-12 Feed-forward Function
11
11-12-2 Feed-forward Control in ODF Control
The feed-forward function that can be used in the ODF control comes in 2 types: velocity feed-forward
and torque feed-forward. In the ODF control, the responsiveness can be increased by changing these
feed-forward amounts.
The following are the feed-forward setting objects used in the ODF control.
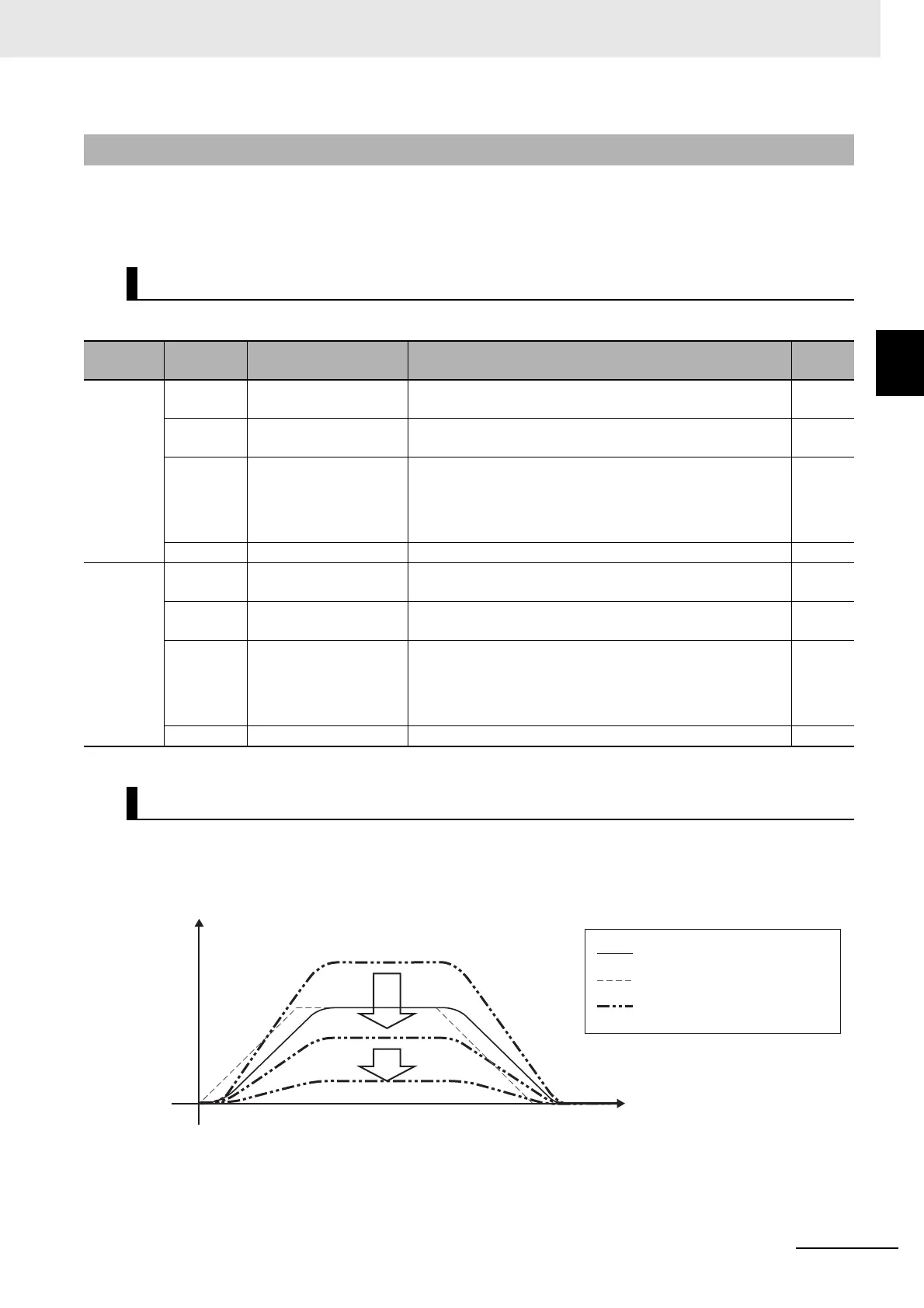
Increase the value of ODF Velocity Feed-forward – Gain (3112-01 hex) little by little to adjust the gain
so that overshooting does not occur during acceleration/deceleration.
If you set ODF Velocity Feed-forward - Gain to 1,000 (100%), the calculated following error will be 0.
However, large overshooting may occur during acceleration/deceleration.
The following error in a constant velocity range gets smaller as you increase the velocity feed-forward
gain.
11-12-2 Feed-forward Control in ODF Control
ODF Control-related Objects
Index
(hex)
Subindex
(hex)
Name Description
Refer-
ence
3112
---
ODF Velocity
Feed-forward
Sets the velocity feed-forward in the one-degree-of-freedom
control.
P. 9 - 2 8
01 Gain Sets the velocity feed-forward gain. Normally, use the
default setting.
P. 9 - 2 8
02 LPF Enable Selects whether to enable or disable the low-pass filter in
the velocity feed-forward.
0: Disabled
1: Enabled
P. 9 - 2 8
03 LPF Cutoff Frequency Sets the cutoff frequency for the feed-forward low-pass filter. P. 9-28
3113
---
ODF Torque
Feed-forward
Sets the torque feed-forward in the one-degree-of-freedom
control.
P. 9 - 2 9
01 Gain Sets the torque feed-forward gain. Normally, use the default
setting.
P. 9 - 2 9
02 LPF Enable Selects whether to enable or disable the low-pass filter in
the torque feed-forward.
0: Disabled
1: Enabled
P. 9 - 3 0
03 LPF Cutoff Frequency Sets the cutoff frequency for the feed-forward low-pass filter. P. 9-30
Operating Method of ODF Velocity Feed-forward
Present Motor Velocity
Position Command – Motor Velocity
Following error
ODF Velocity FF Gain
0 [%]
50 [%]
80 [%]
Time
 Loading...
Loading...

