A - 43
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-2 CoE Objects
A
A-2-8 Servo Drive Profile Object
Description of bits specific to operation mode
• Target position ignored, Target velocity ignored, and Target torque ignored show whether the
operation can follow the command. These bits change to 0 when operation cannot follow the com-
mand due to Drive Prohibition, Software Position Limit, etc.
• Status Toggle switches between 0 and 1 each time an RxPDO is received. The function of this bit is
enabled or disabled with Function Settings (60DA hex).
• For how to use other bits, refer to Profile Position Mode on page 6-16 for the Profile position mode,
Profile Velocity Mode on page 6-21 for the Profile velocity mode, and Homing Mode Specifications on
page A-7 for the Homing mode.
• This object sets the operation of the Servo Drive during Shutdown (transition from the Operation
enabled state to the Ready to switch on state). “During Shutdown” refers to the duration in which the
Servo Drive decelerates and then stops after main circuit power OFF (Shutdown).
• When the running motor decelerates and the speed reaches 30 r/min or lower, the operation changes
from the Deceleration Operation to the Operation after Stopping.
• The following error is cleared regardless of the set value.
12 to 13 Operation mode specific These bits are specific to the operation mode.
14 to 15 Manufacturer specific These are manufacturer specific bits. These bits are not
used by 1S-series Servo Drives.
*1. The Voltage enabled bit indicates that the main circuit power supply voltage is applied when it is 1.
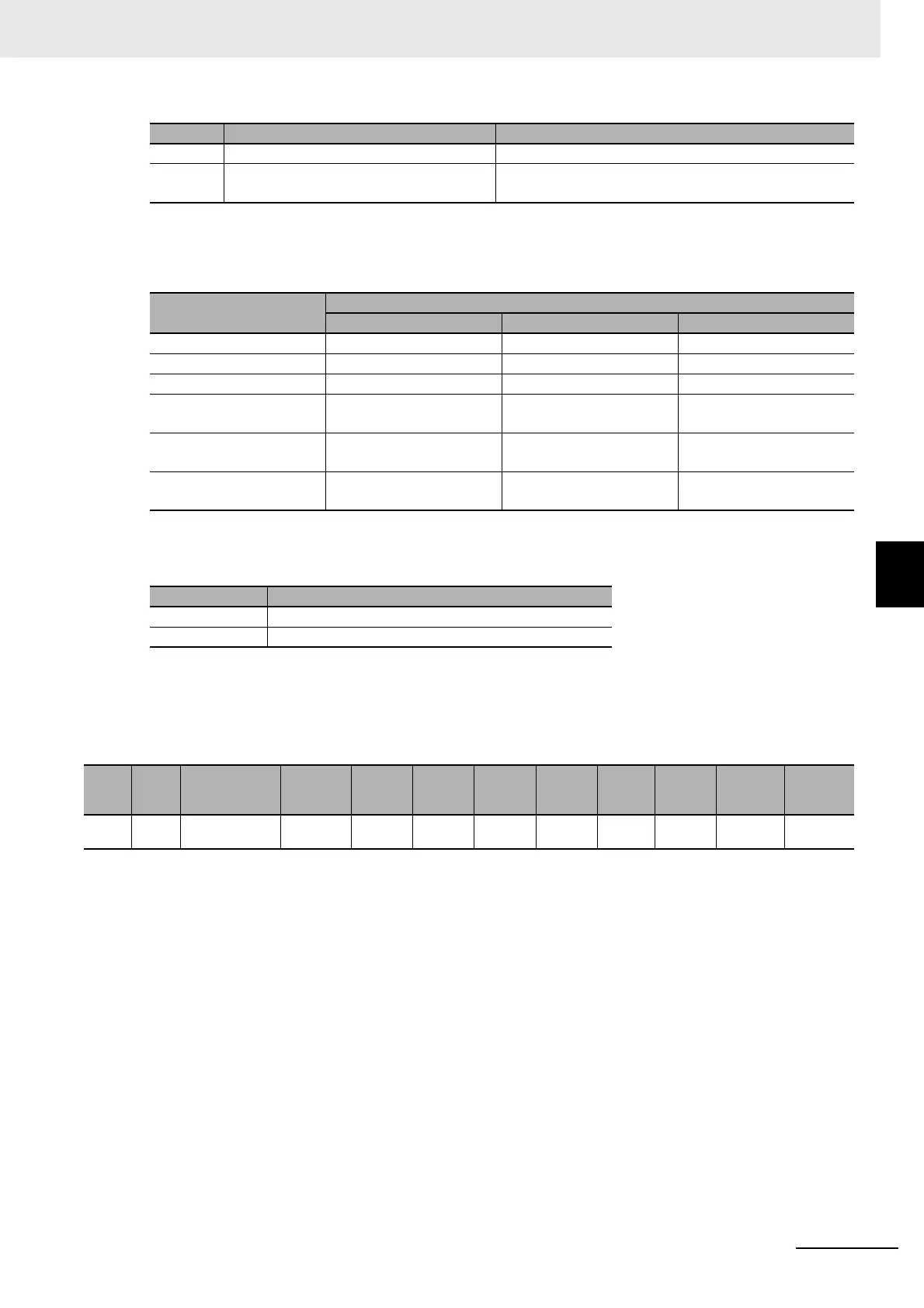
Modes of operation
Controlword
Bit 13 Bit 12 Bit 10
Profile position mode (pp) Following error Set-point acknowledge Target reached
Profile velocity mode (pv) --- Speed Target reached
Homing mode (hm) Homing error Homing attained Target reached
Cyclic synchronous posi-
tion mode (csp)
Following error Target position ignored Status Toggle
Cyclic synchronous veloc-
ity mode (csv)
--- Target velocity ignored Status Toggle
Cyclic synchronous torque
mode (cst)
--- Target torque ignored Status Toggle
Set value Description
0 Ignore command
1 Follow command
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
605B --- Shutdown
option code
-7 to 0 --- -5 E 2 bytes
(INT16)
RW --- Not possi-
ble
---
Bit Name Description