9 - 9
9 Details on Servo Parameters
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
9-2 Common Control Objects
9
9-2-1 3000 hex: Basic Functions
• Gives the failure cause when the motor does not rotate.
• If the value of a bit is 1, the motor stop cause which corresponds to the bit is present.
Description of Set Values
• Gives the present mode of operation.
• Mirror object of 6061 hex
Description of Set Values
• Gives the functions which are supported by the Servo Drive.
• Mirror object of 60D9 hex
Description of Set Values
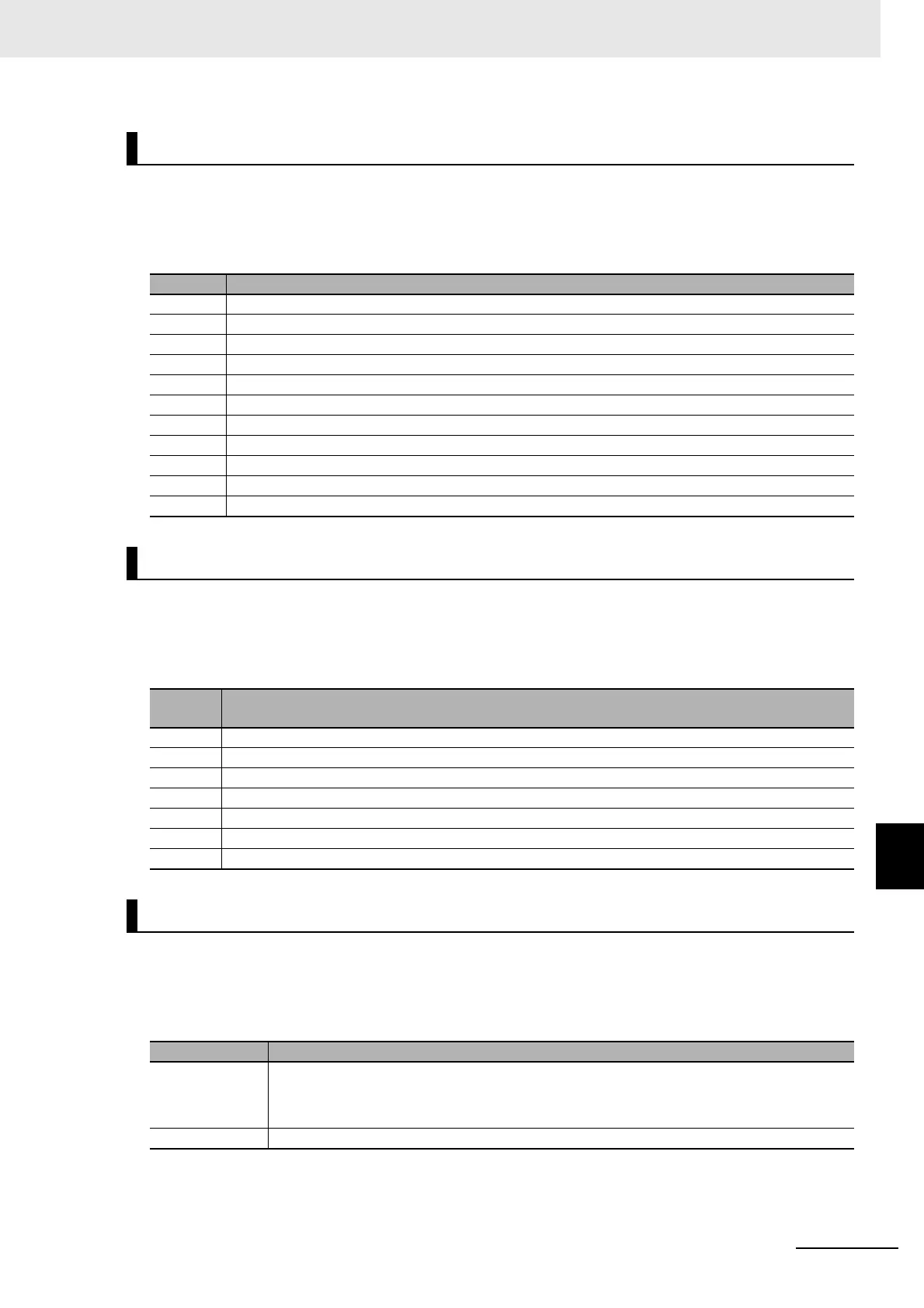
Subindex 82 hex: Motor Stop Cause
Bit Description
0 Main circuit power supply not turned ON
1Not Servo ON
2 Drive Prohibition state
3 Software Position Limit state
4 Position command variation is 0
5 Velocity command value is 0
6 Max profile velocity is 0
7 Torque command value is 0
8 Torque limit value is 0
9 Velocity Limit in Torque Control is 0
31 STO status
Subindex 83 hex: Modes of Operation Display
Set
value
Description
0 Not specified.
1 Profile position mode (pp)
3 Profile velocity mode (pv)
6 Homing mode (hm)
8 Cyclic synchronous position mode (csp)
9 Cyclic synchronous velocity mode (csv)
10 Cyclic synchronous torque mode (cst)
Subindex 84 hex: Supported Functions
Set value Description
Bit 0 Status Toggle
0: Disabled
1: Enabled
Bits 1 to 31 Reserved
 Loading...
Loading...

