A - 57
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-2 CoE Objects
A
A-2-8 Servo Drive Profile Object
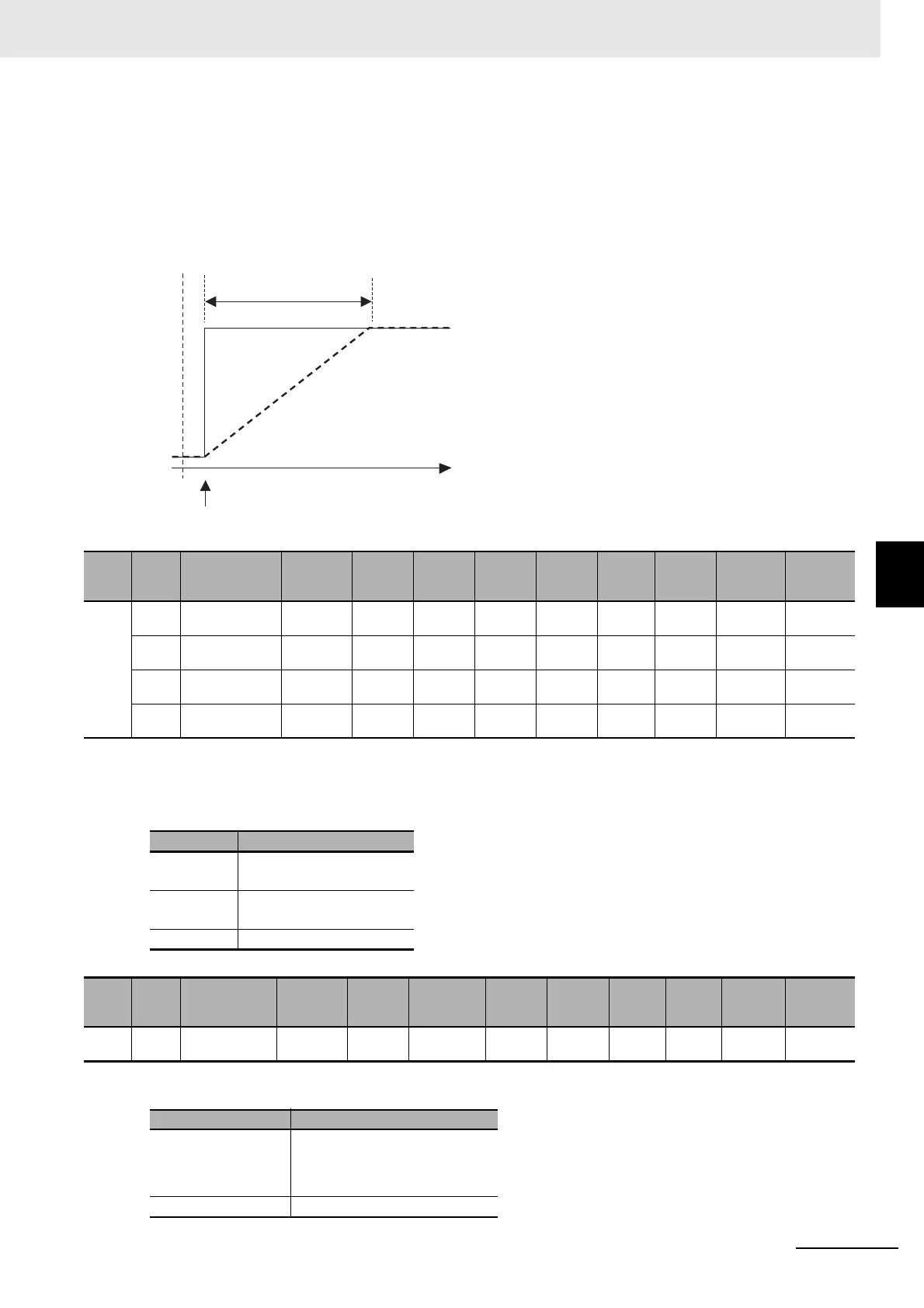
• In the free-run mode only, the setting is updated, and in the synchronous mode, the EtherCAT com-
munications are automatically set as the interpolation time period.
• Interpolation time period = Interpolation time period value × 10
(Interpolation time index)
seconds.
• The set interpolation time period is used to perform linear interpolation for the target position and cal-
culate the command position.
• If the set value exceeds 100 ms, then 100 ms is used to calculate the command position.
• This object selects the trigger to be used for the latch function.
Description of Set Values
• This object gives the extended functions which are supported by the Servo Drive.
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
60D0 --- Touch probe
source
--- --- --- --- --- --- --- Possible ---
00 Number of
entries
--- --- 02 hex --- 1 byte
(U8)
RO --- --- ---
01 Touch probe 1
source
1 to 6 --- 1 A 2 bytes
(INT16)
RW --- --- ---
02 Touch probe 2
source
1 to 6 --- 2 A 2 bytes
(INT16)
RW --- --- ---
Value Description
1 External Latch Input 1
(EXT1)
2
External Latch Input 2
(EXT2)
6 Encoder Phase Z
Index
(hex)
Sub-
index
(hex)
Object name
Setting
range
Unit
Default
setting
Data
attri-
bute
Size Access
PDO
map
Com-
plete
access
Modes of
operation
60D9 --- Supported
functions
--- --- 00000001
hex
--- 4 bytes
(U32)
RO --- Not pos-
sible
---
Set value Description
Bit 0 Status Toggle
0: Not supported
1: Supported
Bits 1 to 31 Reserved
Interpolation time period
Target position
Command position
PDO
receive