9 Servo Parameter Objects
9 - 38
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
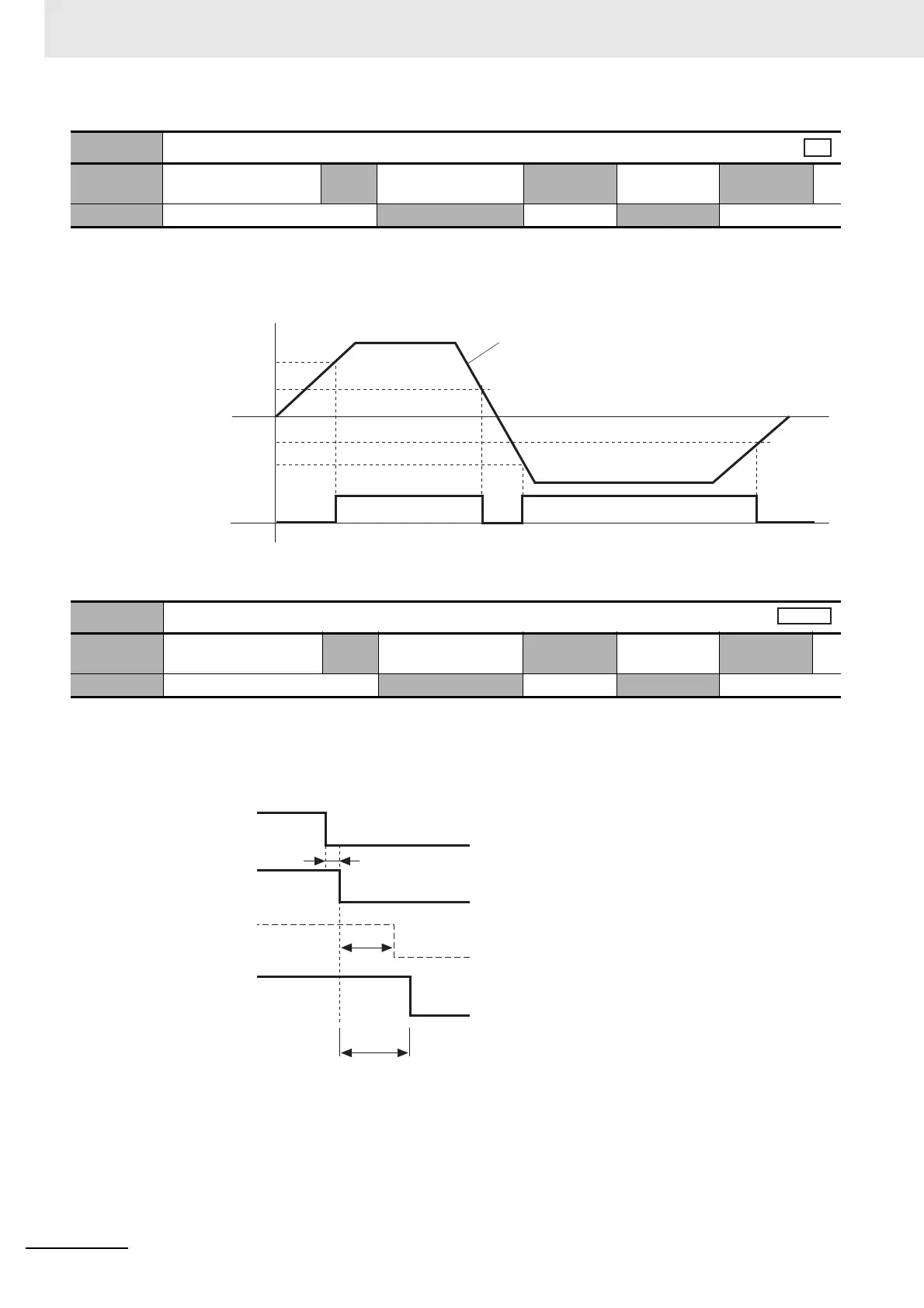
• It outputs the Motor Speed Detection Output (TGON) when the motor speed reaches the set Speed
for Motor Detection (3436 hex).
• The setting has a hysteresis of 10 mm/s.
Refer to 3-1-9 Control Output Details on page 3-12 for the Motor Speed Detection Output (TGON).
• Set the time required for the motor to be de-energized (servo free) after the Brake Interlock Output
(BKIR) turns OFF (i.e., brake held), when servo OFF status is entered while the motor is stopped.
• When the servo is turned OFF while the motor is stopped, the brake interlock output (BKIR) turns
ON, and the servo is de-energized after waiting for the set time (set value × ms).
*1 Make the setting as follows to prevent the machine (workpiece) from moving or falling due to the delay time in
the brake operation (tb).
Brake timing when stopped (set value × 1 ms) ≥ tb
For the operation time, refer to 7-5 Brake Interlock on page 7-15.
3436 hex
Speed for Motor Detection
Setting
range
10 to 20,000
Unit
mm/s
Default
setting
1,000 Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible
3437 hex
Brake Timing when Stopped
Setting
range
0 to 10,000
Unit
ms
Default
setting
0 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3436 hex + 10
3436 hex – 10
– (3436 hex – 10)
– (3436 hex + 10)
OFF OFFON ON
Speed [mm/s]
Motor speed
Time
Motor Speed
Detection Output
3437 hex
tb
*1
1 to 6 ms
(BKIR)
Servo ON/OFF
Brake interlock
Actual brake
Motor power
is supplied.
Released
Hold
Released
Power
supply
Hold
No power
supply

 Loading...
Loading...
