9 - 63
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-8 Linear Motor Objects
9
• Set the phase inductance of the Linear Motor you connect to the Servo Drive.
For details, refer to 3-3 Linear Motor Specifications on page 3-28.
Precautions for Correct UsePrecautions for Correct Use
If you set this object to 0 when the Current Response Auto-adjustment (3912 hex) is not 0, a
Motor Setting Error (Error No. 60.0) will occur.
• Set the phase resistance of the Linear Motor you connect to the Servo Drive.
For details, refer to 3-3 Linear Motor Specifications on page 3-28.
Precautions for Correct UsePrecautions for Correct Use
If you set this object to 0 when the Current Response Auto-adjustment (3912 hex) is not 0, a
Motor Setting Error (Error No. 60.0) will occur.
• Set the detection level for an Overspeed Error (Error No. 26.0).
• Set the maximum speed appropriate for the specifications of the selected Linear Motor, external
encoder, linear guides, or other equipment.
• For the set value, refer to the specifications of the selected equipment.
Precautions for Correct UsePrecautions for Correct Use
If you set this object to 0, a Motor Setting Error (Error No. 60.0) will occur.
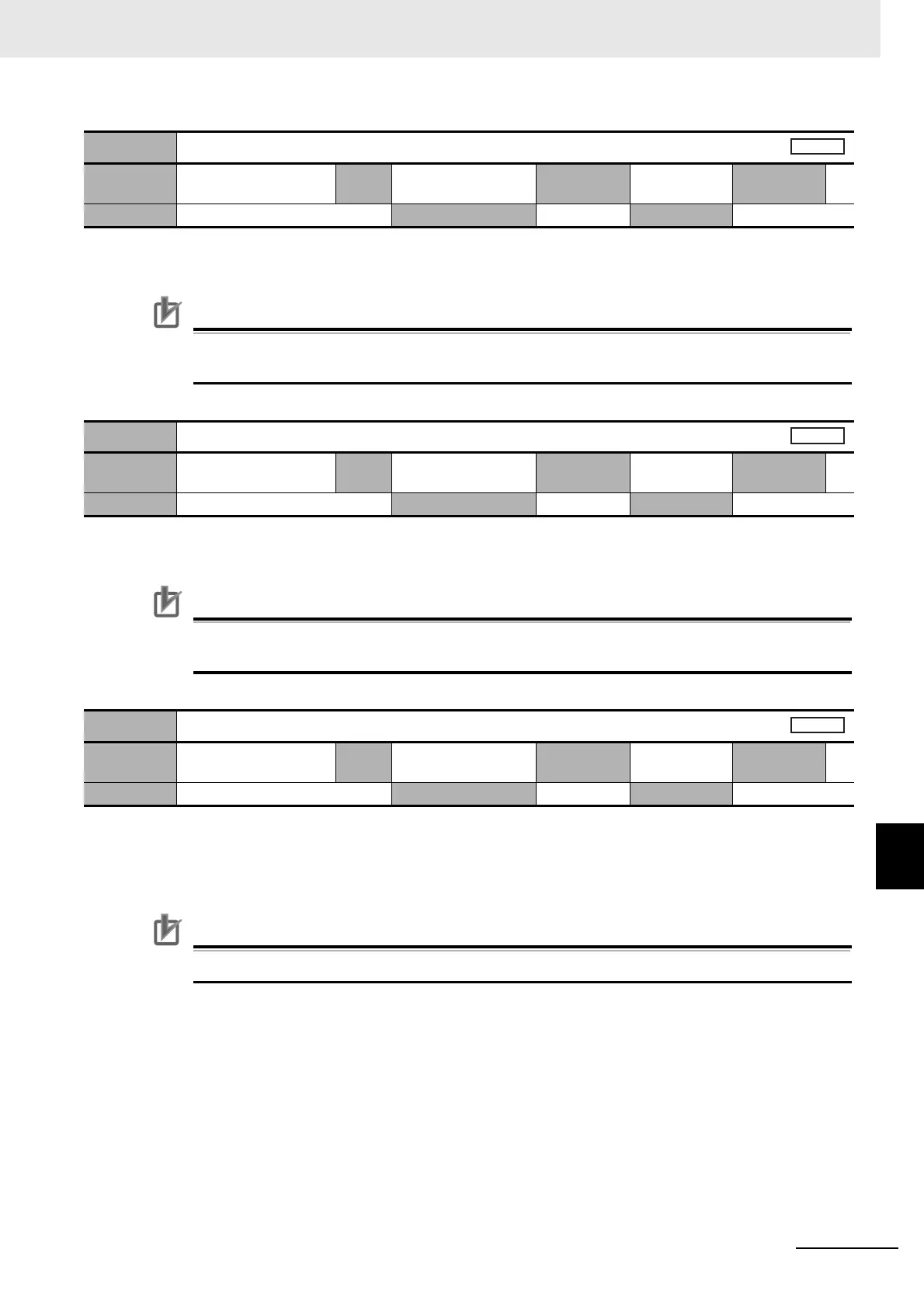
3908 hex
Motor Inductance
Setting
range
0 to 32,767
Unit
0.01 mH
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
3909 hex
Motor Resistance
Setting
range
0 to 32,767
Unit
0.01 Ω
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible
3910 hex
Overspeed Level
Setting
range
0 to 20,000
Unit
mm/s
Default
setting
0 Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible

 Loading...
Loading...
