9 - 69
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-8 Linear Motor Objects
9
• Set the limit time during which the motor can be judged as stopped during magnetic pole position
estimation.
• This time represents the time elapsed after the stoppage of a force command until the motor comes
to a complete stop.
• If the motor has not been judged as stopped when the set limit time expires, a Magnetic Pole Position
Estimation Error (Error No. 61.1) will occur.
• This setting is enabled only when the Magnetic Pole Detection Method (3920 hex) is set to 2
(Magnetic pole position estimation).
Precautions for Correct UsePrecautions for Correct Use
If you set a large value in the Magnetic Pole Position Estimation Force Command (3923 hex) or
Magnetic Pole Position Estimation Maximum Movement (3924 hex), it may take a long time until
the motor stops because the motor speed when a force command stops will become high. The
motor may take a long time to stop due to a low kinetic friction. In these cases, increase the set
value.
• Set the filter time constant for force commands during magnetic pole position estimation.
• When the set value is 0, the filter is disabled and commands will be processed as step commands.
• This setting is enabled only when the Magnetic Pole Detection Method (3920 hex) is set to 2
(Magnetic pole position estimation).
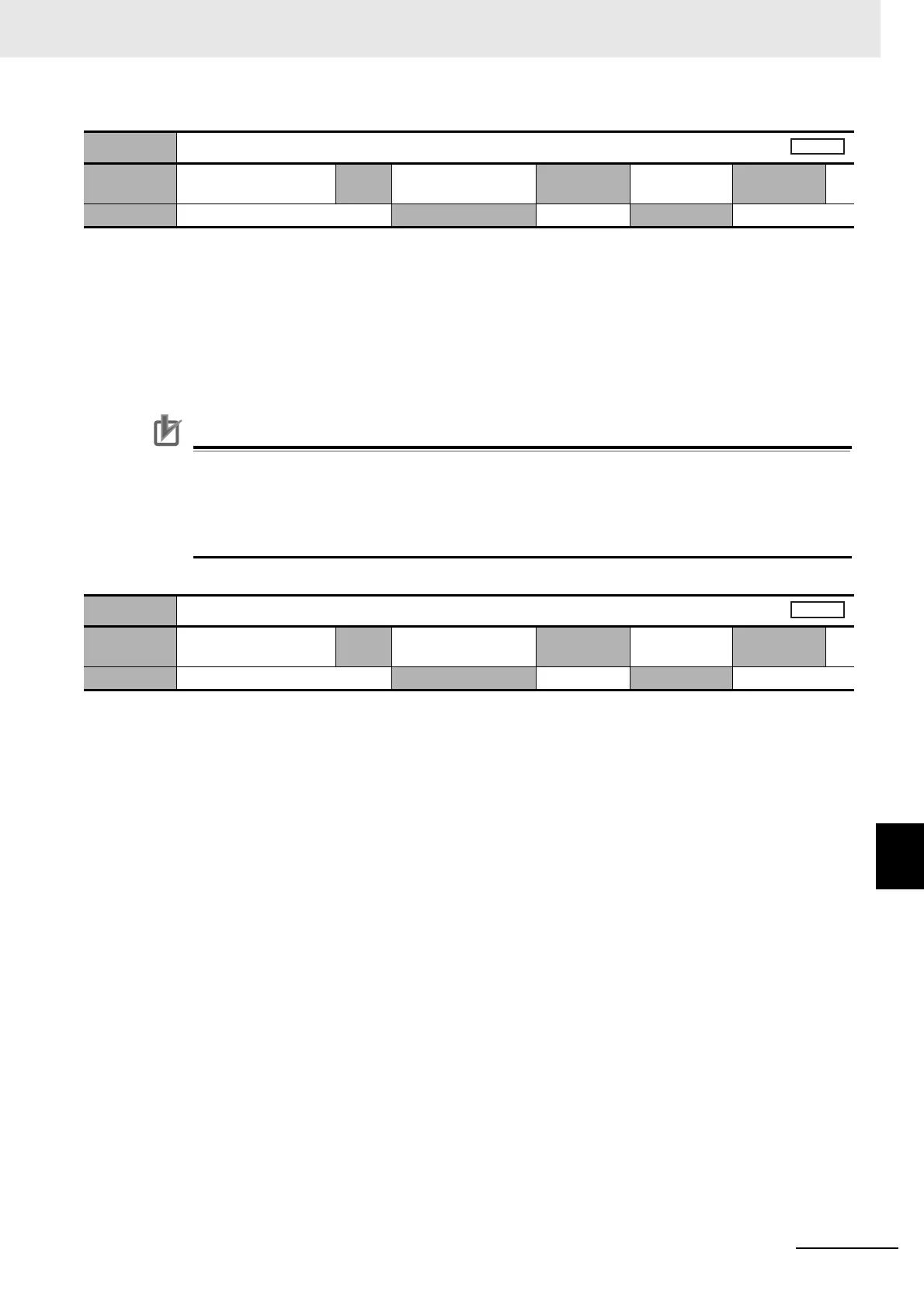
3927 hex
Magnetic Pole Position Estimation Time Limit for Stop
Setting
range
0 to 32,767
Unit
ms
Default
setting
1,000 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible
3928 hex
Magnetic Pole Position Estimation Force Filter Time Constant
Setting
range
0 to 2,500
Unit
0.01 ms
Default
setting
100 Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible

 Loading...
Loading...
