Appendices
A - 16
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
Bit 6 is not used.
For details on other bits, refer to Controlword (6040 hex).
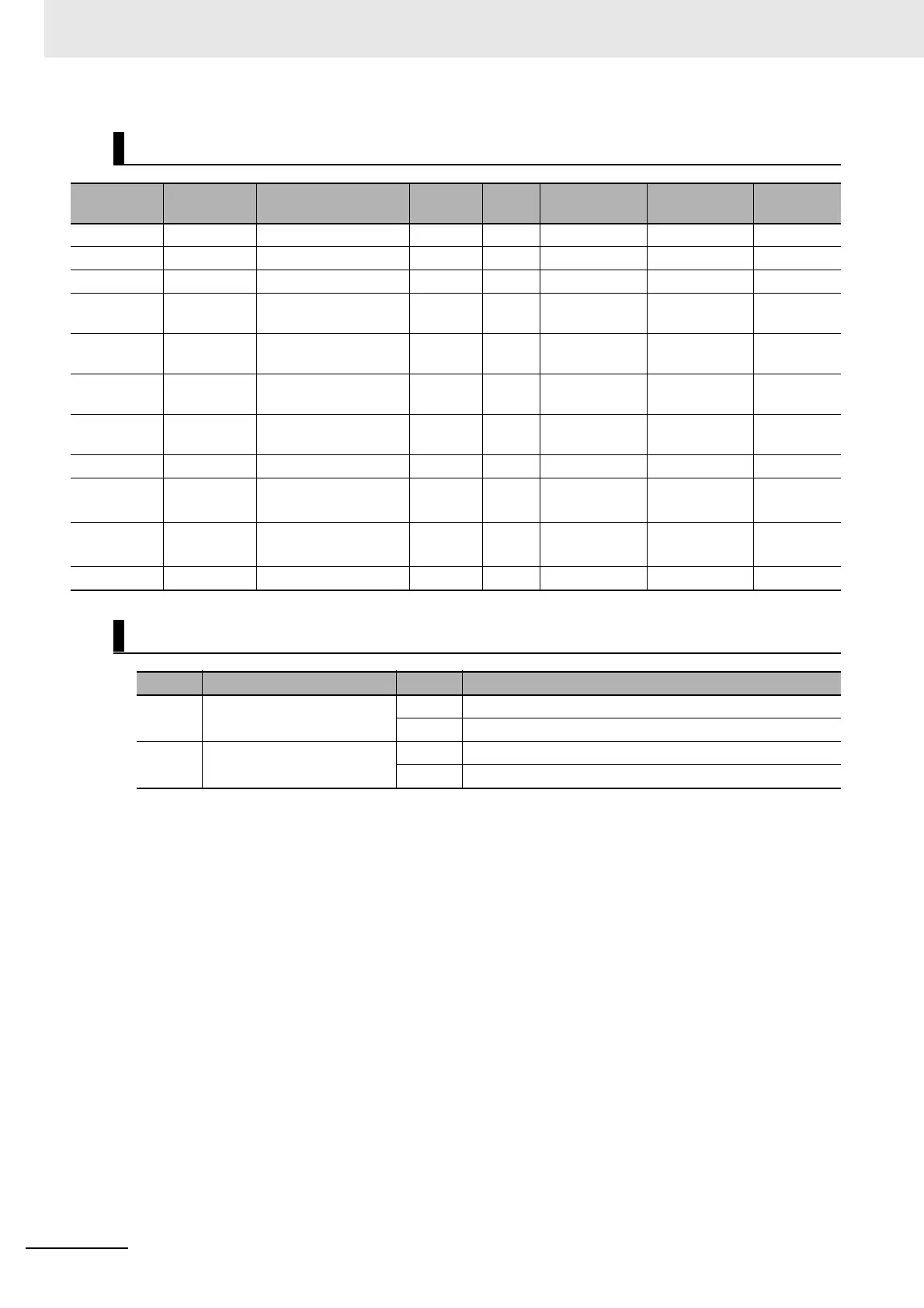
Related Objects
Index Sub-index
Name Access Size Unit Setting range
Default
setting
6040 hex 00 hex Controlword RW U16 – 0 to FFFF hex 0000 hex
6060 hex 00 hex Modes of operation RW INT8 – 0 to 10 0000 hex
6098 hex 00 hex Homing method RW INT8 – –128 to 127 0
6099 hex 01 hex Speed during search
for switch
RW U32 Command
unit/s
100 to
3,276,700
5,000
6099 hex 02 hex Speed during search
for zero
RW U32 Command
unit/s
100 to
3,276,700
5,000
4103 hex 00 hex Coordinate System
Setting Mode
RW U16 – 0000 to
FFFF hex
0000 hex
4104 hex 00 hex Coordinate System
Setting Position
RW INT32 Command
units
–2,147,483,648
to 2,147,483,647
0
6041 hex 00 hex Statusword RO U16 – 0 to FFFF hex 0000 hex
6083 hex 00 hex Profile acceleration RW U32 Command
unit/s
2
1 to
655,350,000
1,000,000
6084 hex 00 hex Profile deceleration RW U32 Command
unit/s
2
1 to
655,350,000
1,000,000
6086 hex 00 hex Motion profile type RW INT16 – –1 to 0 0
Controlword (6040 hex) in Homing Mode
Bit Name Value Description
4 Homing operation start 0 Do not start homing procedure.
1 Start or continue homing procedure.
8 Halt 0 Enable bit 4.
1 Stop axis according to halt option code (605D hex).

 Loading...
Loading...
