6-30
6-7 Gain Switching Function
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
6
Applied Functions
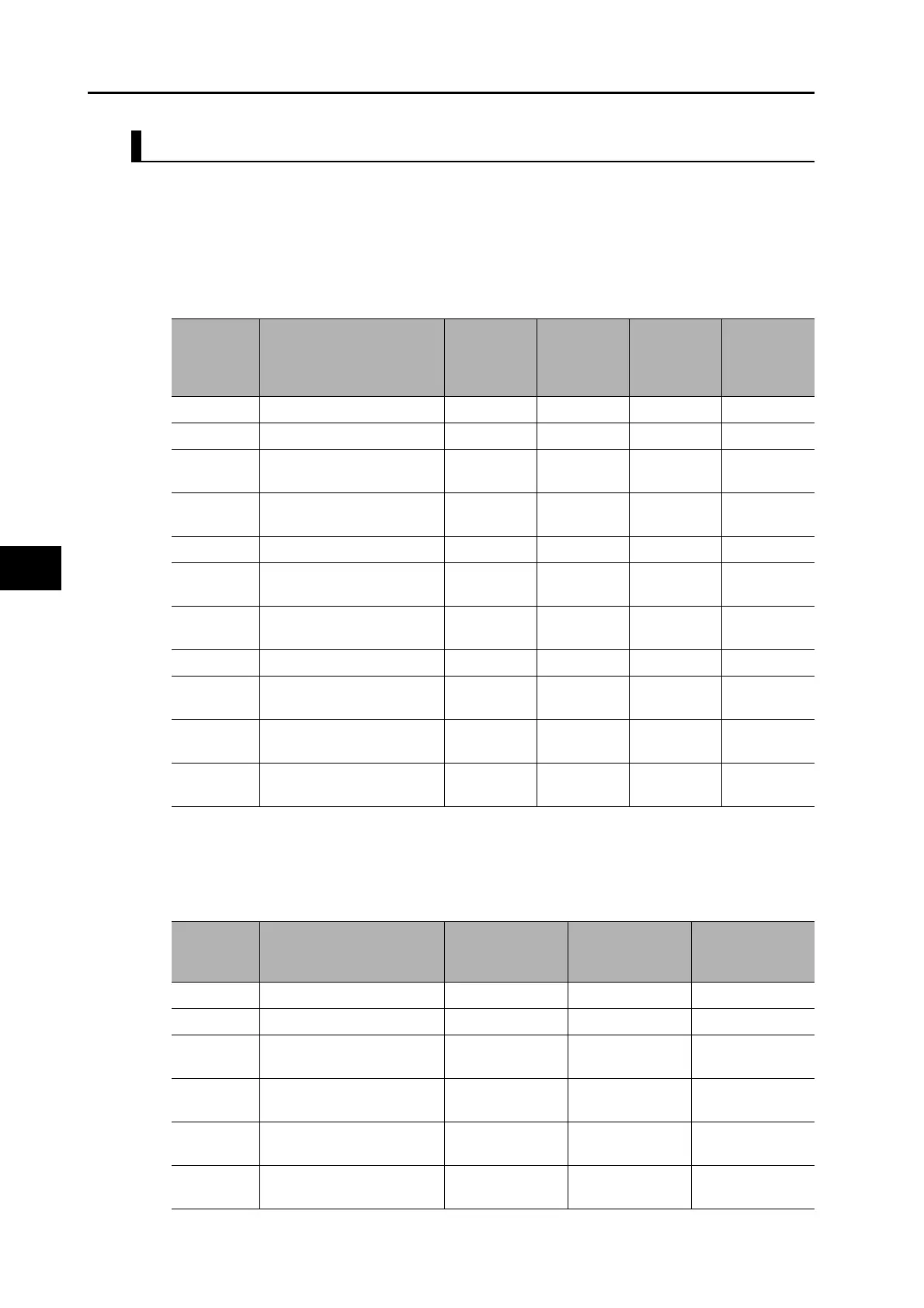
Gain Switching Setting for Each Control Mode
The settable switching conditions vary depending on the control mode used. Set the
parameters for each control mode.
Position Control Mode
In the Position Control Mode, it varies as follows according to gain switching mode in Position
Control (Pn115).
(√: Enabled, − : Disabled)
Speed Control Mode
In the Speed Control Mode, it varies as follows according to switching mode in Speed Control
(Pn120).
(√: Enabled, − : Disabled)
Pn115 set
value
Switching conditions
Gain
Switching
Delay Time
(Pn116)
Gain
Switching
Level
(Pn117)
Gain
Switching
Hysteresis
(Pn118)
Position
Gain
Switching
Time (Pn119)
0 Always gain 1 −−−−
1 Always gain 2 −−−−
2
Switching from gain
switching (GSEL)
−−−√
3
Torque command change
amount
√
√
[× 0.05%]
√
[× 0.05%]
√
4 Always gain 1 −−−−
5
Command speed
√
√
[r/min]
√
[r/min]
√
6
Amount of position error
√
√
[pulse]
√
[pulse]
√
7 Position command received √−−√
8
Positioning completion
signal (INP1) OFF
√−−√
9
Actual motor speed
√
√
[r/min]
√
[r/min]
√
10
Combination of position
command received and speed
√√√√
Pn120 set
value
Switching conditions
Gain Switching
Delay Time
(Pn121)
Gain Switching
Level (Pn122)
Gain Switching
Hysteresis
(Pn123)
0 Always gain 1 −−−
1 Always gain 2 −−−
2
Switching from gain
switching (GSEL)
−−−
3
Torque command change
amount
√
√
[× 0.05%]
√
[× 0.05%]
4
Amount of change in speed
command
−−−
5
Speed command
√
√
[r/min]
√
[r/min]
 Loading...
Loading...