8-2
8-1 Basic Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
Explanation of Set Values
Set the control mode to be used.
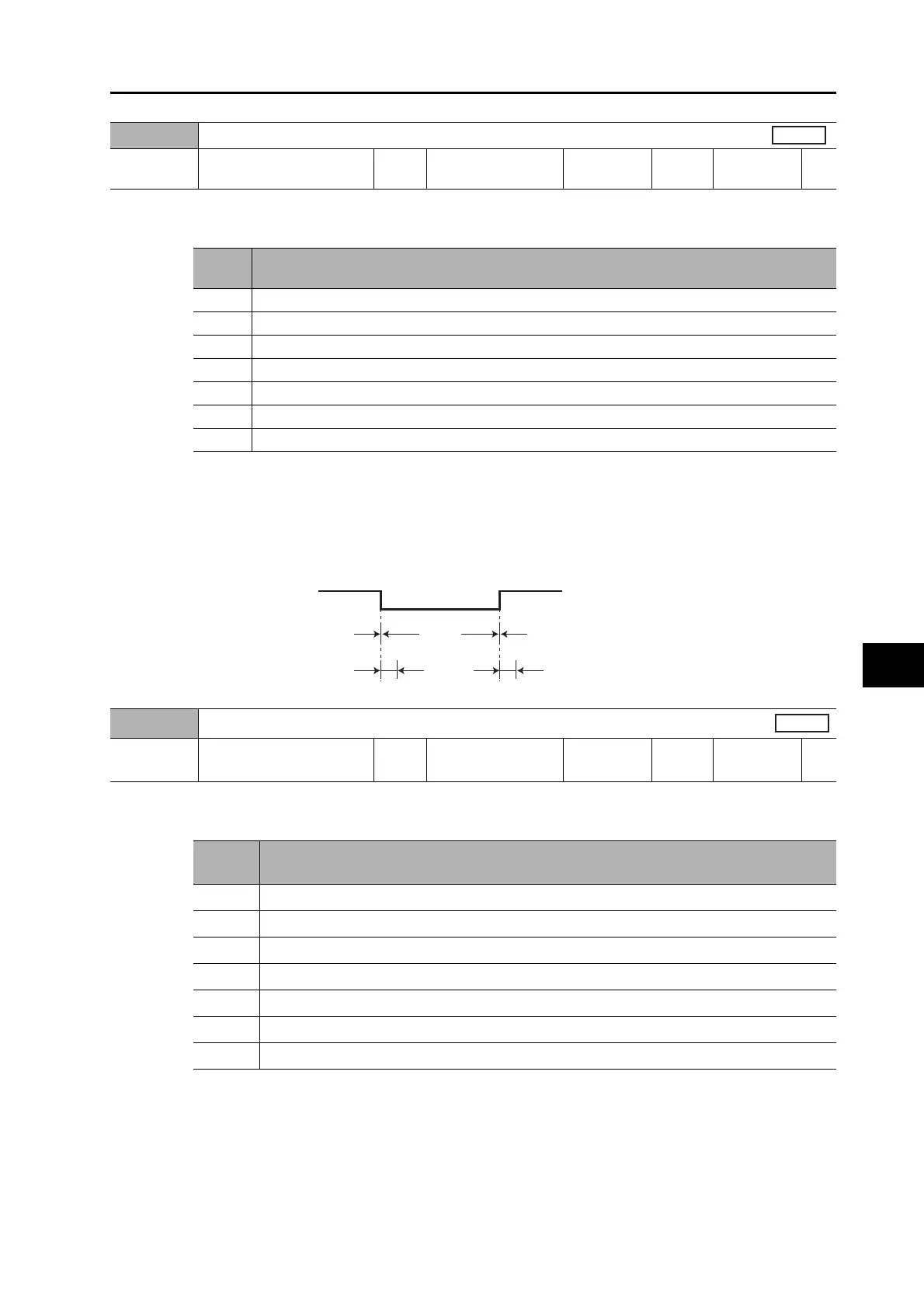
If a composite mode is set (set values: 3 to 5), mode 1 or mode 2 can be selected using the control
mode switching input (TVSEL).
· When the control mode switching input is open: Select mode 1.
· When the control mode switching input is short-circuited: Select mode 2.
Do not input a command within 10 ms before or after switching.
Explanation of Set Values
Refer to "10-2 Realtime Autotuning" (P.10-3) for details on the settings
Pn001
Control Mode Selection
Setting
range
0 to 6 Unit −
Default
setting
0
Power OFF
and ON
Yes
All
Set
value
Description
0 Position control (pulse train command)
1 Speed control (analog command)
2 Torque control (analog command)
3 Mode 1: Position control, Mode 2: Speed control
4 Mode 1: Position control, Mode 2: Torque control
5 Mode 1: Speed control, Mode 2: Torque control
6 Fully-closed control
12
Close
Open
Control mode
switching input
10 ms or more 10 ms or more
Open
1
Pn002
Realtime Autotuning Mode Selection
Setting
range
0 to 6 Unit −
Default
setting
1
Power OFF
and ON
−
Set
value
Description
0 Disabled
1 This mode focuses on stability.
2 This mode focuses on positioning.
3 Used when an unbalanced load is present such as a vertical axis.
4 Used when friction is large (unbalanced load also calculated).
5 Used only for estimating load characteristics.
6 Used when customizing Realtime Autotuning Mode.
 Loading...
Loading...