3.2 Connectors of the servo driver
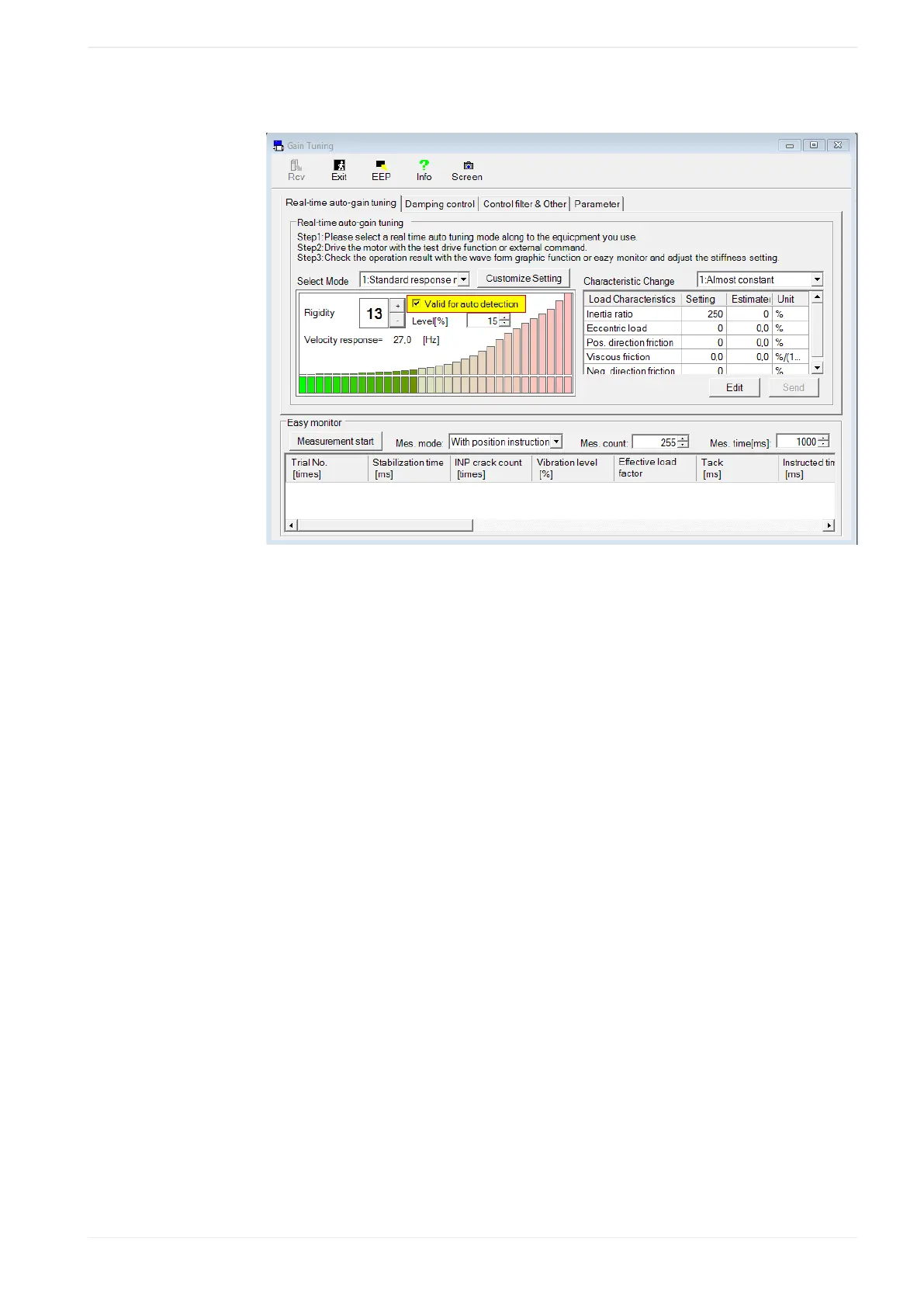
8. Select the “Valid for auto detection” check box.
9. Increase the mechanical rigidity by increasing the value in the “Rigidity” box step by
step.
The software will automatically set the correct value and, if necessary, decrease the
rigidity to an appropriate value.
10. Select “Invalid” in the “Select Mode” list box.
11. Select the “EEP” icon to save the parameters in the EEPROM of the servo driver.
A dialog shows the gain parameters related to the inertia moment which have been
changed.
12. Confirm these values.
13. Shut down and restart the system.
The system is now ready to perform the required positioning movements.
QS5001_V1.0_EN 11