6. COMMAND REFERENCE 105
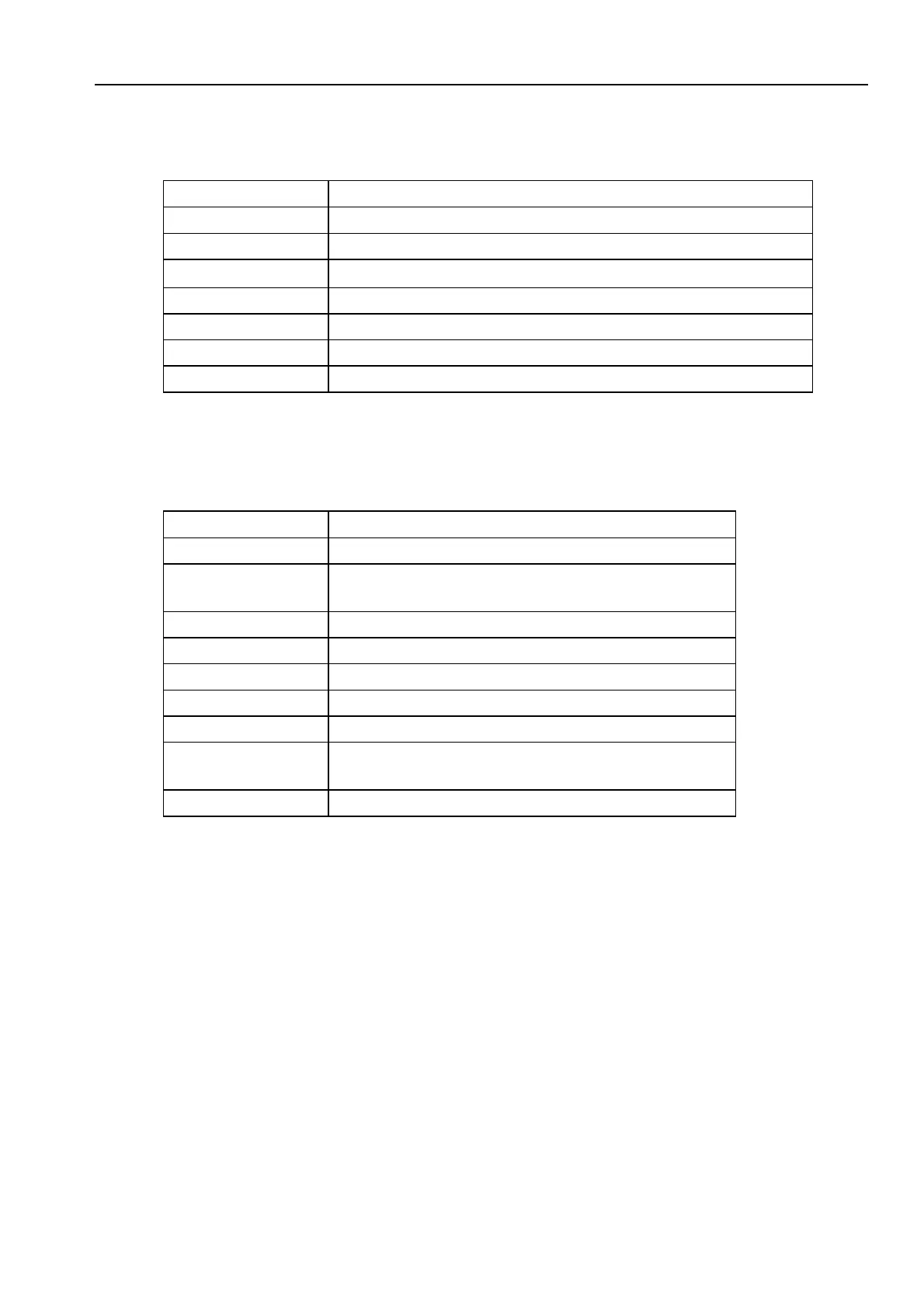
Status Bits
Bit Number Status Information
9 Motor energised
10 Motor undefined, use MOTOR command
16
Duty cycle too high, excessive motor current (I
2
t)
23 Tracking limit is greater than max. allowed position error
24 Last SETUPFB command failed
25 In motion, 0 for positive motion, 1 for negative motion
26 Brake applied, goes to a 1 if the brake is engaged
User Faults
Bit Number UF Information
1 Value is out of range
2 Incorrect command syntax, command has
wrong format
8 Drive de-energised
16 Transmit buffer overflow*
19 Drive not ready
22 Save/restore error
23 Command not supported by this product
26 Cannot execute motion as the brake is
engaged
27 to 32 Reserved
*sends an ASCII ‘bell’ character to indicate a buffer overflow condition.