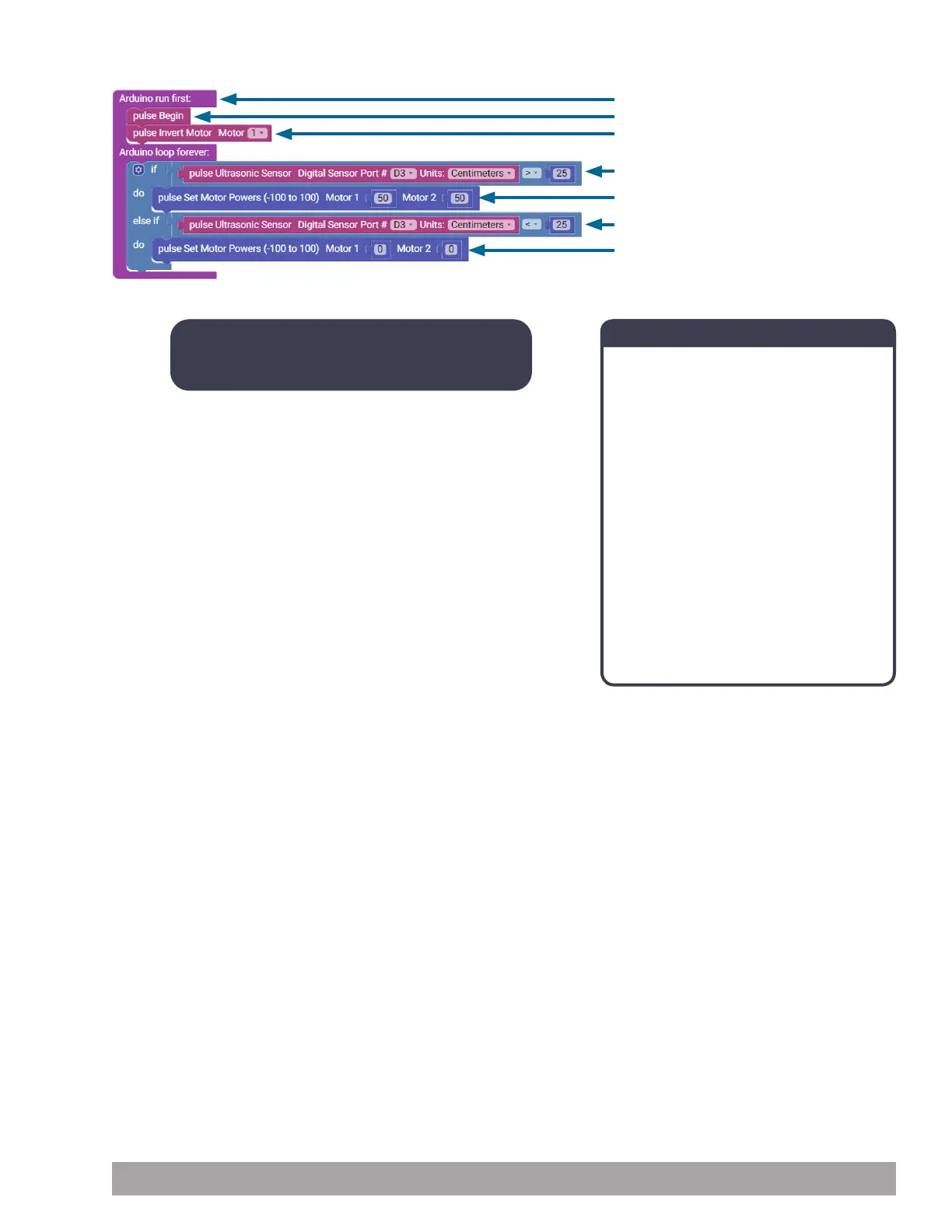
Block-Text Correlation
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
if (pulse.readSonicSensorCM(3) > 25) {
pulse.setMotorPowers(50,50);
} else if (pulse.readSonicSensorCM(3) < 25) {
pulse.setMotorPowers(0,0);
Note: The bot will drive forward until it encounters
an obstacle 25 cm away, and then it will brake.
Arduino Source Code
#include <PULSE.h>
PULSE pulse;
void setup() {
pulse.PulseBegin();
pulse.setMotorInvert(1,1);
}
void loop() {
if (pulse.readSonicSensorCM(3) > 25) {
pulse.setMotorPowers(50,50);
} else if (pulse.readSonicSensorCM(3) < 25) {
pulse.setMotorPowers(0,0);
}
}
Building and Coding the PULSE CodeeBot 115

 Loading...
Loading...
