12
2.4.4 Het oppervlak controleren
• Zorg ervoor dat de roboilter schoon is, zodat het robotgedrag hierdoor niet kan worden beïnvloed.
• Zodra de reinigingscyclus is gestart, observeert u het gedrag van de robot wanneer hij tegen de wanden klimt en de
waterlijn borstelt.
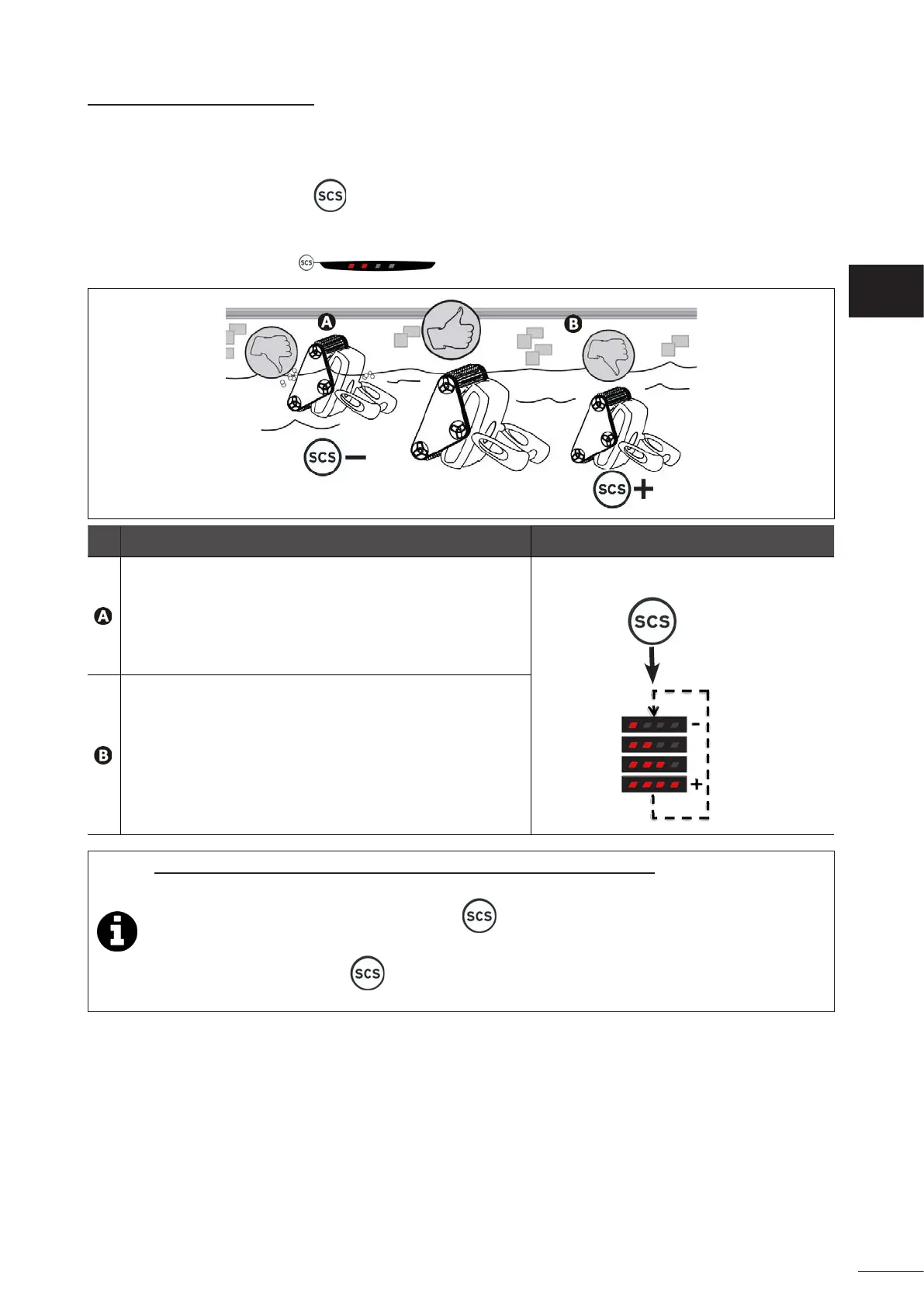
• Op elk moment kunt u de knop (Surface Control System) gebruiken volgens het gedrag van de robot: zie de
volgende tabel.
• De nieuwe instelling zal acef zijn bij de volgende beklimming van de wanden.
• Standaard branden er 2 leds .
Robotgedrag waarop moet worden gelet Ace
De robot beklimt de wanden snel en komt boven de
waterlijn totdat hij lucht aanzuigt: Verminder het aantal
leds.
Druk op:
De robot beklimt de wanden langzaam en stopt onder de
waterlijn: Verhoog het aantal leds.
Tip: Opmaliseer het reinigen van de wanden en het poetsen van de waterlijn
Afhankelijk van de liner van het zwembad zal de robot zich anders gedragen bij het beklimmen van de
wanden. De robot maakt gebruik van de functie voor een optimale schoonmaak van de wanden en
vervolgens het borstelen van de waterlijn op alle soorten lining.
Ongeacht de ingestelde funce , zal de zuigkracht aljd maximaal zijn, wanneer de robot zich verplaatst
op de bodem van het zwembad.
NL
 Loading...
Loading...