7
1.3 I Principe de fonconnement
Le robot est indépendant du système de ltraon et peut fonconner de manière autonome. Il sut de le brancher sur
le secteur.
Il se déplace de façon opmale pour neoyer les zones du bassin pour lesquelles il a été conçu (selon modèle : fond,
parois, ligne d’eau). Les débris sont aspirés et stockés dans le ltre du robot.
Le boîer de commande permet de lancer, choisir, et programmer le neoyage (selon modèle).
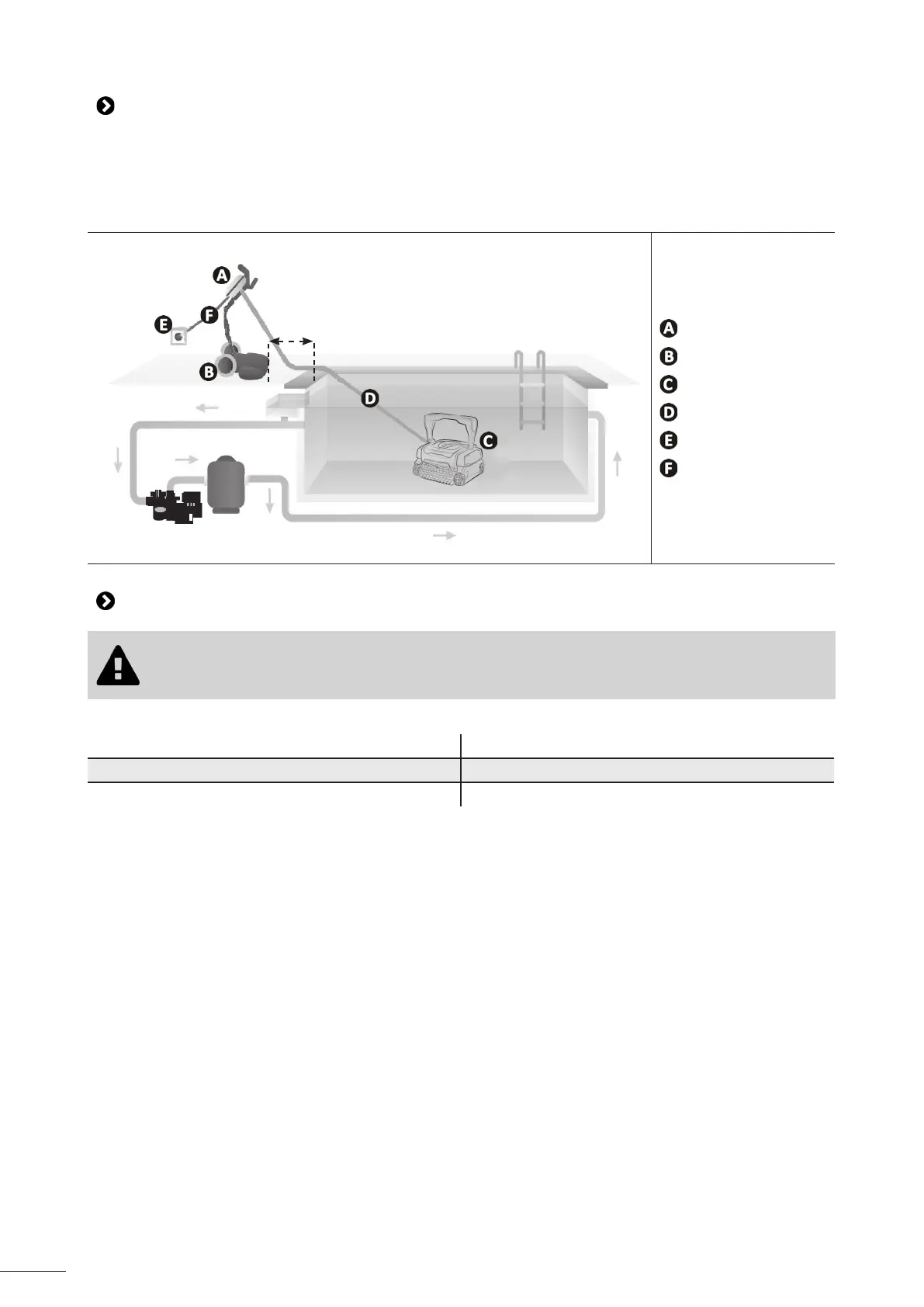
3.5 mètres
Minimum
: Boîer de commande
: Chariot
: Robot
: Câble oant
: Prise de courant
: Câble d’alimentaon
1.4 I Préparaon de la piscine
• Ce produit est desné à une ulisaon dans des piscines installées de manière permanente.
Ne pas l’uliser dans des piscines démontables. Une piscine permanente est construite dans
ou sur le sol, et ne peut pas être facilement démontée et rangée.
• L’appareil doit fonconner dans une eau de piscine dont la qualité est la suivante :
Température de l’eau Entre 15°C et 35°C
pH Entre 6.8 et 7.6
Chlore libre < 3 mg/ l
• Lorsque la piscine est sale, notamment lors de la mise en service, rerer les très gros débris à l’aide d’une épuisee
an d’opmiser les performances de l’appareil.
• Rerer thermomètres, jouets et autres objets qui pourraient endommager l’appareil.
 Loading...
Loading...