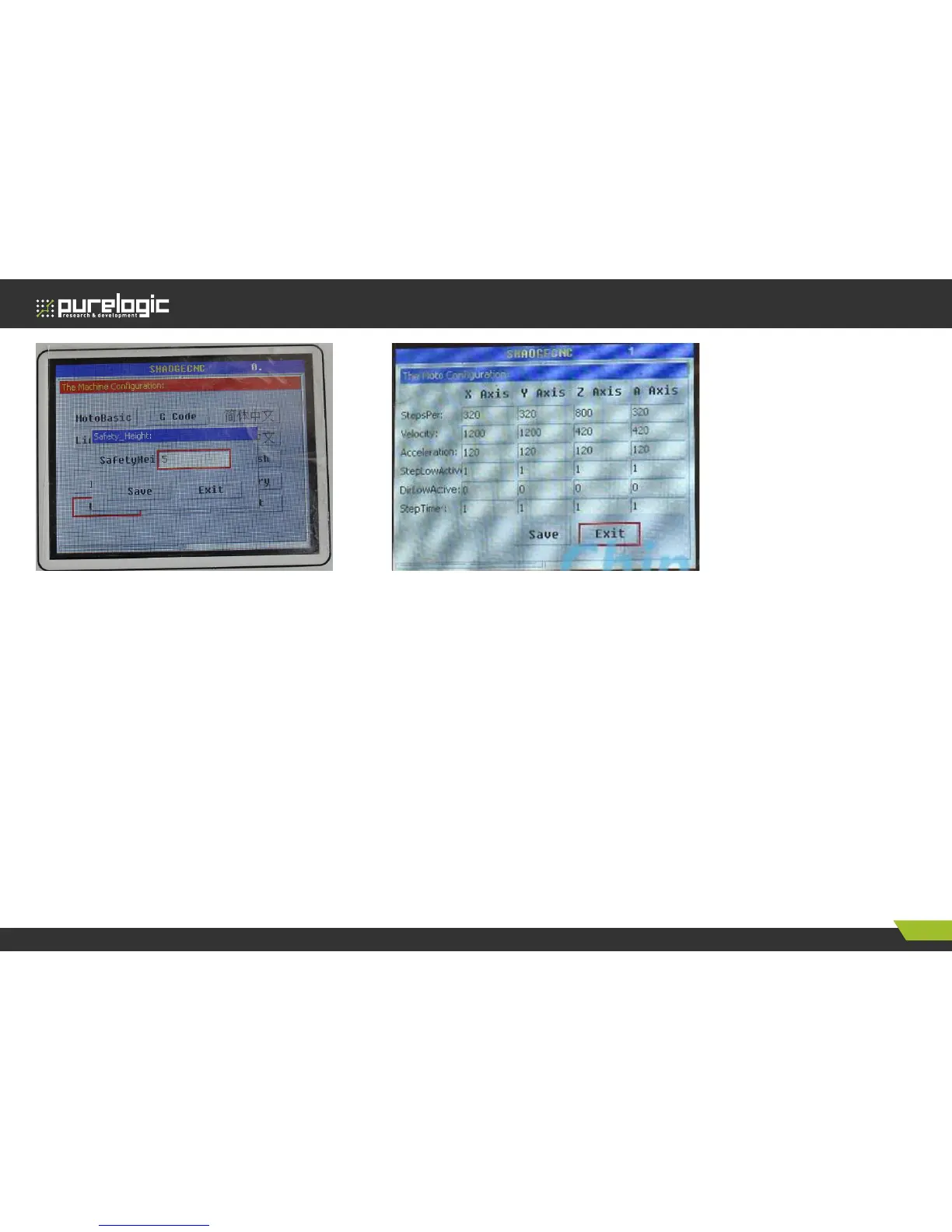
Acceleration: Maximum acceleration of the motor can run, this value is too small will be more seriously affected micro segment corner speed.
Pulse level: 1 or 0, active high or active low, determined by the drive.
Direction level: 1 or 0, active high or active low, this change will change running direction.
Pulse Width: Pulse valid output time, only one value,normally can take 0.
Pulse equivalent=Stepper motor driver number of subdivisions * 360 / stepper motor step angle) / screw thread pitch.
Example: Step angle = 1.8 screw pitch = 5mm segments = 8
pulses equivalent = 8 * (360/1.8) / 5 = 320
Maximum speed value: the ability to be finalized in accordance with the motor,based on not fall out step,take 70% of maximum speed values, leaving
30% margin to the motor (characteristics of stepper motor).
T acceleration table is as follows:
Acceleration values: the ability to be finalized in accordance with the motor, based on not fall out step, take 70% of maximum speed values, leaving
30% margin to the motor (characteristics of stepper motor).
Pulse relationship level and pulse width (Note: The actual width is Given width Plus default width).

 Loading...
Loading...