CHAPTER 3
12 ROS AccuBoom™ Calibration & Operation Manual
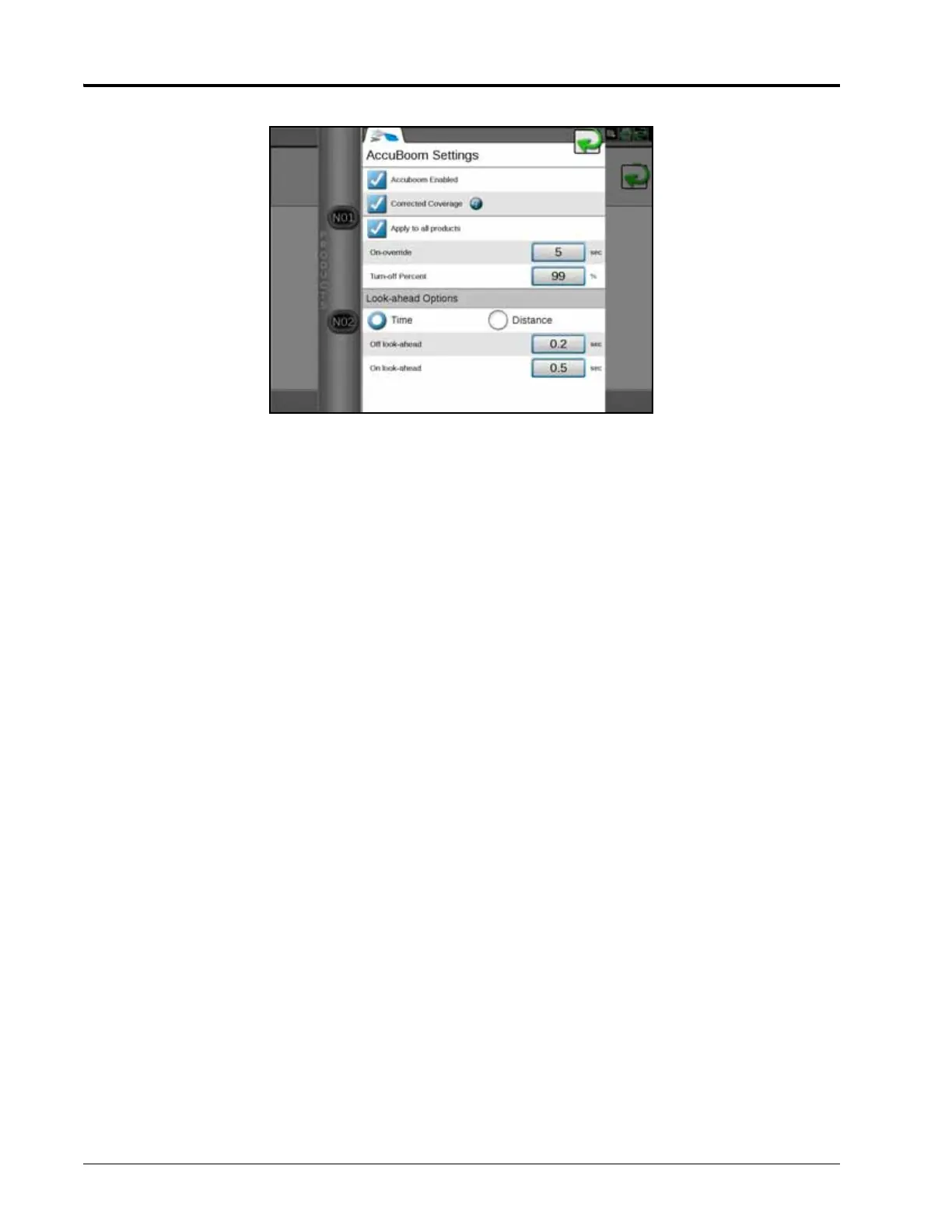
2. Locate and select the AccuBoom button. The AccuBoom Settings tab will display.
ACCUBOOM ENABLED
Touch the AccuBoom Enabled option at the top of the AccuBoom Settings tab to toggle automatic section control
features on or off for field operations. This feature may be useful for operations in which automatic section control
may not be desired. AccuBoom enabled is a global settings and applies to all products.
CORRECTED COVERAGE
Corrected Coverage does not affect AccuBoom Performance, it only affects how the system paints to coverage.
Corrected Coverage can only be turned on or off while out of a job.
If Corrected Coverage is disabled, it is commanded by the commanded state. If Corrected Coverage is enabled,
the Turn-On and Turn-Off Look-Aheads are applied to the coverage. Also, when enabled, Corrected Coverage will
remove the no applied areas when coming into the headlands as a result of AccuBoom off look-ahead.
• With a one second Turn-On Look-Ahead, the system will delay the painting for one second when
coming out of an applied area.
• With a .5 second Turn-Off Look-Ahead the system will continue to paint for .5 seconds when
coming into an applied area.
NOTE: If Corrected Coverage is not enabled when closing the job it will not save and exported with
Corrected Coverage. If Corrected Coverage is enabled when closing the job, it will save and export
with Corrected Coverage.
APPLY TO ALL PRODUCTS OPTION
Enable the “Apply to all products” option at the top of the AccuBoom Settings tab to apply the displayed settings
to all control channels on the CANbus. Use this option to quickly configure consistent AccuBoom settings to all
control channels available on the CANbus. Each channel may be tuned individually later if desired. “Apply All
Products” only affects the Look Ahead Options.
LOOK AHEAD TYPE
Look ahead values may be entered in either time (seconds determined by vehicle speed) or distance (inches or
centimeters).
Time. The time option is the recommended method for calibrating the look ahead values. This method allows the
system to use the current vehicle speed to calculate when the system should begin controlling valves.