HDC2450 Motor Controller Datasheet 9
Electrical Specifications
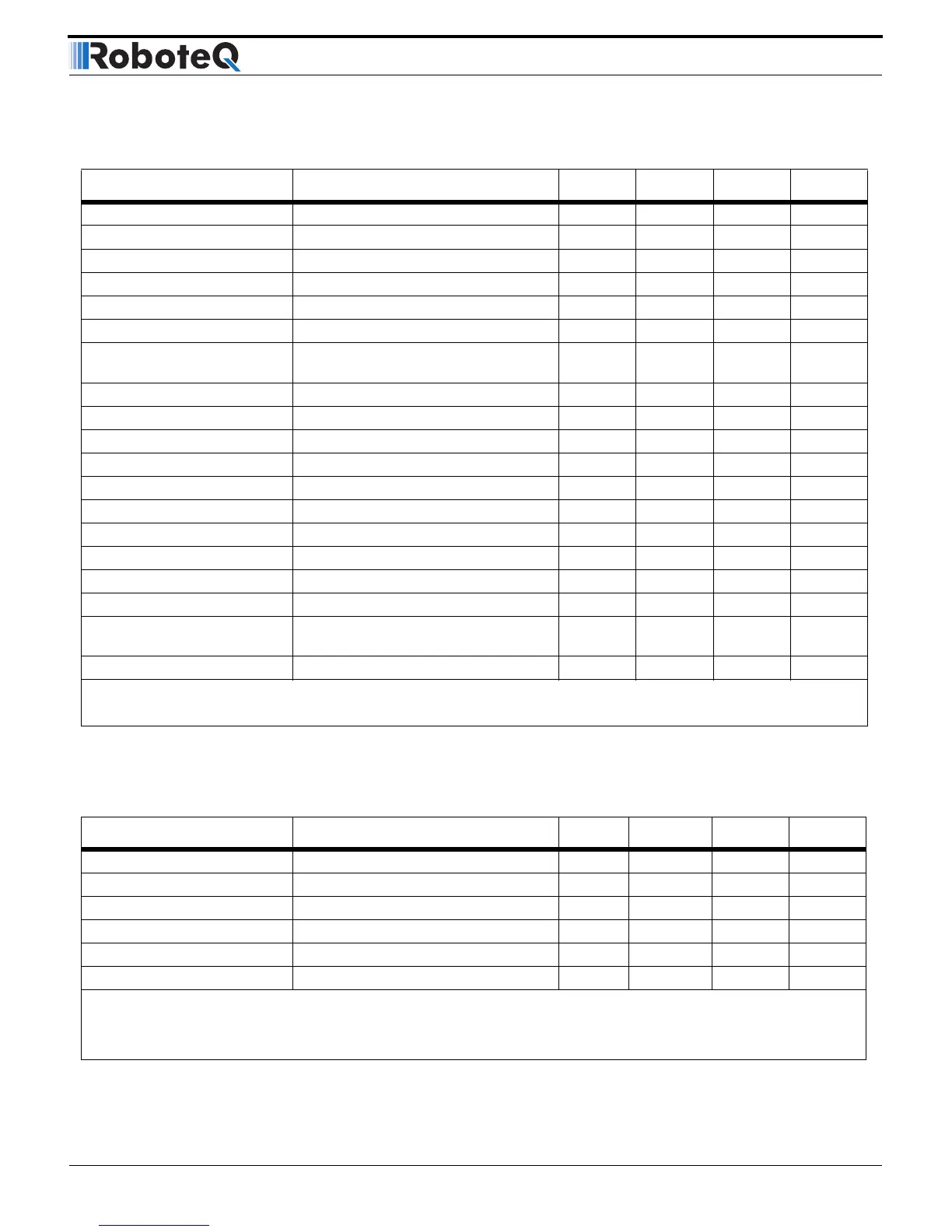
Command, I/O and Sensor Signals Specifications
Operating & Timing Specifications
TABLE 8.
Parameter Measure point Min Typ Max Units
Main 5V Output Voltage Ground to 5V pins on 4.6 4.75 4.9 Volts
5V Output Current 5V pins on RJ45 and DSub15 200 (1) mA
Digital Output Voltage Ground to Output pins 30 Volts
Digital Output Current Output pins, sink current 1 (2) Amps
Output On resistance Output pin to ground 0.75 1.5 Ohm
Output Short circuit threshold Output pin 1.05 1.4 1.75 Amps
Input Impedances (except
DIN12-19)
AIN/DIN Input to Ground 53 kOhm
Input Impedance (DIN12-19) Input to 5V 50 kOhm
Digital Input 0 Level Ground to Input pins -1 1 Volts
Digital Input 1 Level Ground to Input pins 3 15 Volts
Analog Input Range Ground to Input pins 0 5.1 Volts
Analog Input Precision Ground to Input pins 0.5 %
Analog Input Resolution Ground to Input pins 1 mV
Pulse durations Pulse inputs 20000 10 us
Pulse repeat rate Pulse inputs 50 250 Hz
Pulse Capture Resolution Pulse inputs 1 us
Frequency Capture Pulse inputs 100 10000 Hz
Encoder count Internal -2.147 2.15 10^9
Counts
Encoder frequency Encoder input pins 1 MHz
Note 1: Sum of all 5VOut outputs
Note 2: Total average current on all outputs not to exceed 4.5A
TABLE 9.
Parameter Measure Point Min Typ Max Units
Command Latency Command to output change 1 0.5 1 ms
PWM Frequency Ch1, Ch2 outputs 10 18 (1) 32 kHz
Closed Loop update rate Internal 1000 Hz
USB Rate USB pins 12 MBits/s
RS232 baud rate Rx & Tx pins 115200 (2) Bits/s
RS232 Watchdog timeout Rx pin 1 (3) 65000 ms
Note 1: May be adjusted with configuration program
Note 2: 115200, 8-bit, no parity, 1 stop bit, no flow control
Note 3: May be disabled with value 0