Kobuki Turtlebot II. User’s Manual
'arm_4_joint', 'arm_5_joint']
position: [0.0051132692929521375, -0.02556634646476069,
0.02556634646476069, 0.0051132692929521375, -0.02556634646476069,
-0.006135923151542565, -0.010226538585904275,
-0.010226538585904275]
velocity: [-0.042620525427073536, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0,
0.0]
effort: []
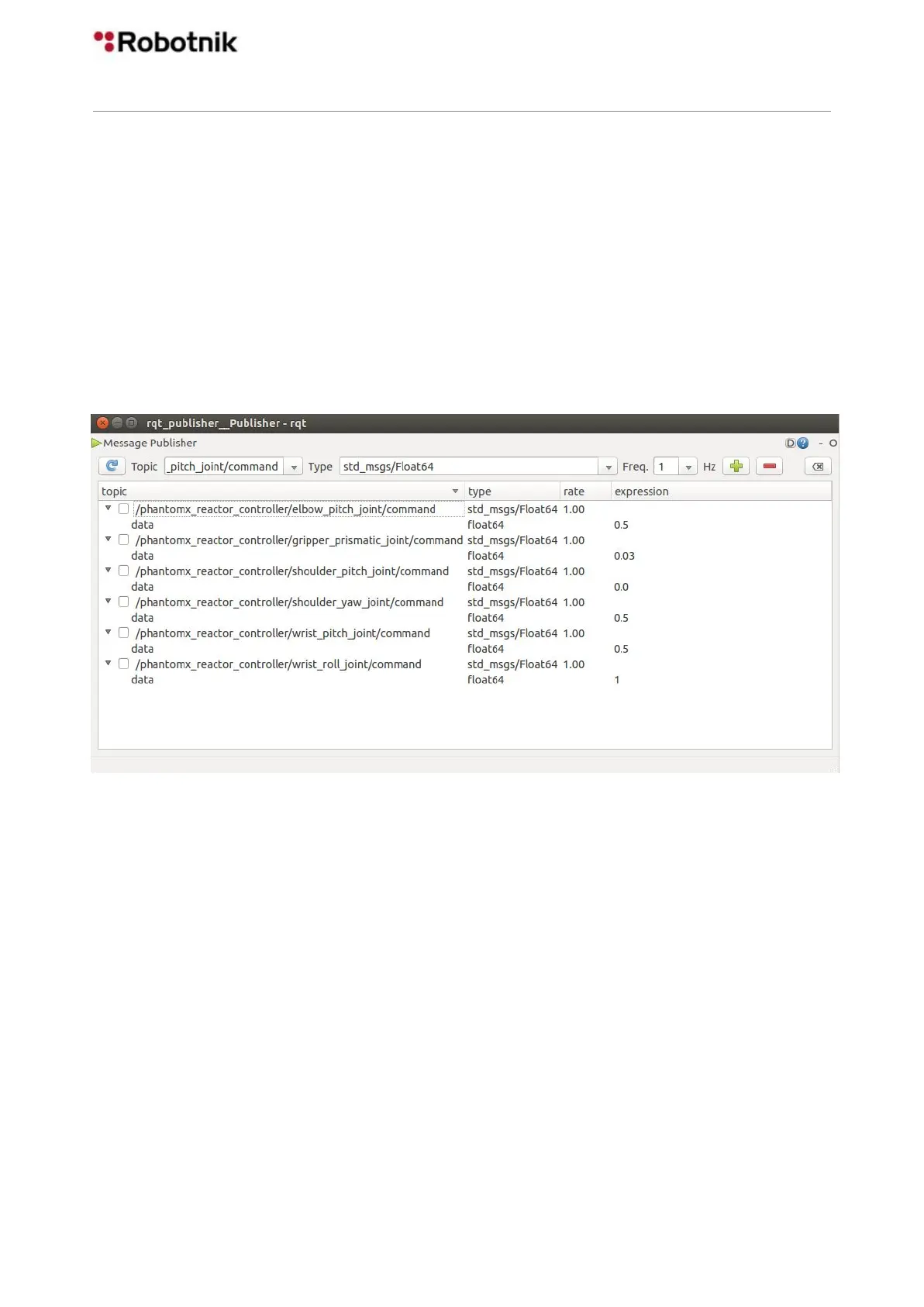
Run the rqt_publisher tool to set the position of the joints:
> rosrun rqt_publisher rqt_publisher
4.5.5 Hokuyo UST10LX
Dependencies:
*ros-kinetic-urg-node
Set the user permissions:
> sudo usermod -a -G dialout turtlebot
To launch the sensor:
>roslaunch turtlebot_bringup hokuyo_ust10lx.launch
4.6 Additional WiFi router
25